自然が宇宙建設にインスピレーションを与えるとき
バイオミメティクスと付加製造の融合により、極限環境での建設を革命化するロボット開発が生まれました。クモの解剖学と移動性に着想を得たこの建設ロボットは、3Dプリントを使用して地球上および将来の月面植民地で構造物を構築します。自然に着想を得たエンジニアリングの演習として始まったものが、宇宙外生息地を自律的に構築する鍵となる可能性があります。
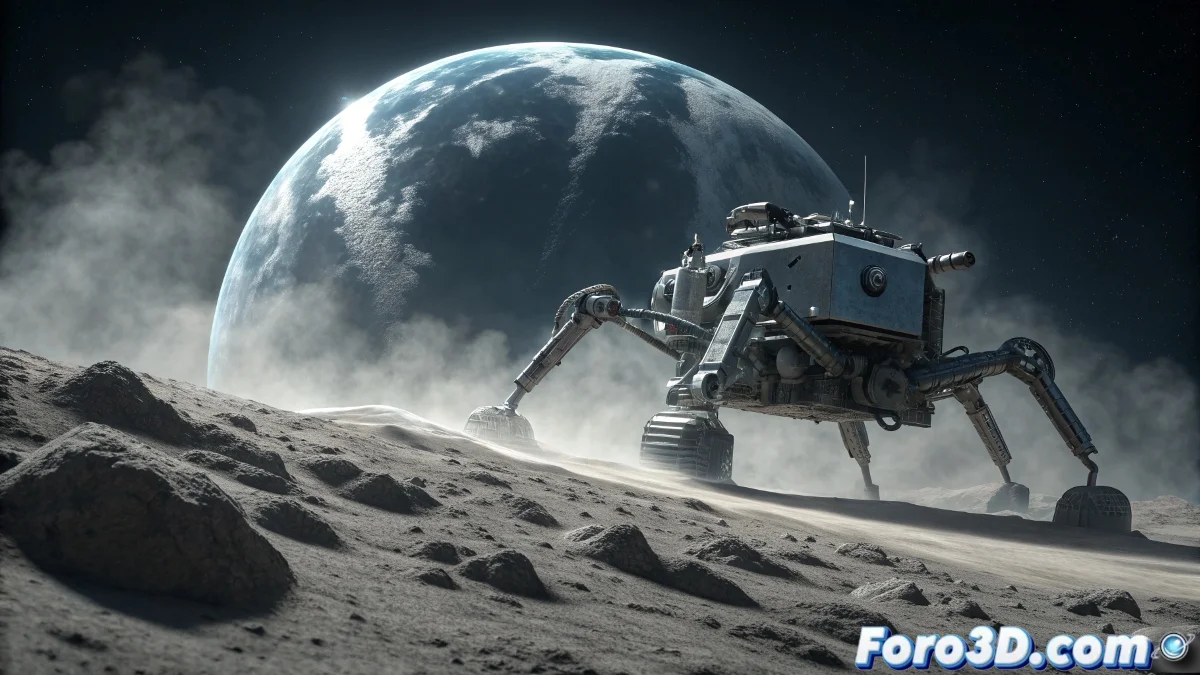
クモ特有の優雅さで移動するこのロボットは、不整地を移動しながら建設材料を堆積させる3次元プリントシステムを備えています。この移動性は、固定作業エリアに限定される従来の3Dプリンターに対する大きな利点です。システムは地形条件に応じて建設戦略を適応させ、不安定な土壌では支持構造をプリントできます。
革新的な技術的特徴
- 多方向移動性 クモの歩行に着想
- プリントシステム 異なる材料や重力に適応
- エネルギー自律性 展開式ソーラーパネルによる
- 自律航法 最適な建設サイト選択用
二重用途:地上および宇宙
ロボットの設計は最初から、自動化建設プロジェクトのほとんどが取り組んでいない二重機能を想定しています。地球上では、災害地帯や人間がアクセスしにくい場所で緊急シェルターや基本インフラを構築できます。月面では、低重力下および現地材料での運用能力により、宇宙飛行士到着前の生息地準備に理想的な候補です。
自然は数百万年前に、工学がようやく理解し始めた問題を解決していました
プリントシステムは、月面を覆うレゴリス(月の土壌)で機能するよう特別に設計されています。レーザー焼結プロセスにより、ロボットは現地材料を固形構造に変換でき、大量のセメントや地球材料を運ぶ必要がありません。この現地資源利用能力は、長期宇宙ミッションの経済的実現可能性に不可欠です。
従来の建設システムに対する優位性
- 地形適応性 地形の制約を克服
- モジュール式スケーラビリティ 協調ロボット群による
- 環境耐性 極端な温度と放射線に対する
- 構造的多用途性 複雑で有機的なジオメトリ作成用
現在のプロトタイプは、グループ展開時に驚くべき協調作業能力を示します。昆虫のコロニーのように、これらのクモロボットは個別では不可能な構造を協調して構築できます。ユニット間の通信により、複雑なタスクを分割し、構築物の構造的完全性を集団的に検証します。
クモは蜘蛛の巣を織るだけだと思っていた人々は、それが最初の月面生息地の建設にインスピレーションを与えるとは想像していなかったでしょう 🕷️