Blenderで歩く猫をステップバイステップでアニメーション化する方法
歩く猫の説得力のあるアニメーションを作成するには、Blenderでいくつかの技術的なステップを計画し実行する必要があります。成功は、よく構築されたリグと四足歩行の動きのメカニクスを理解することに依存します。🐱
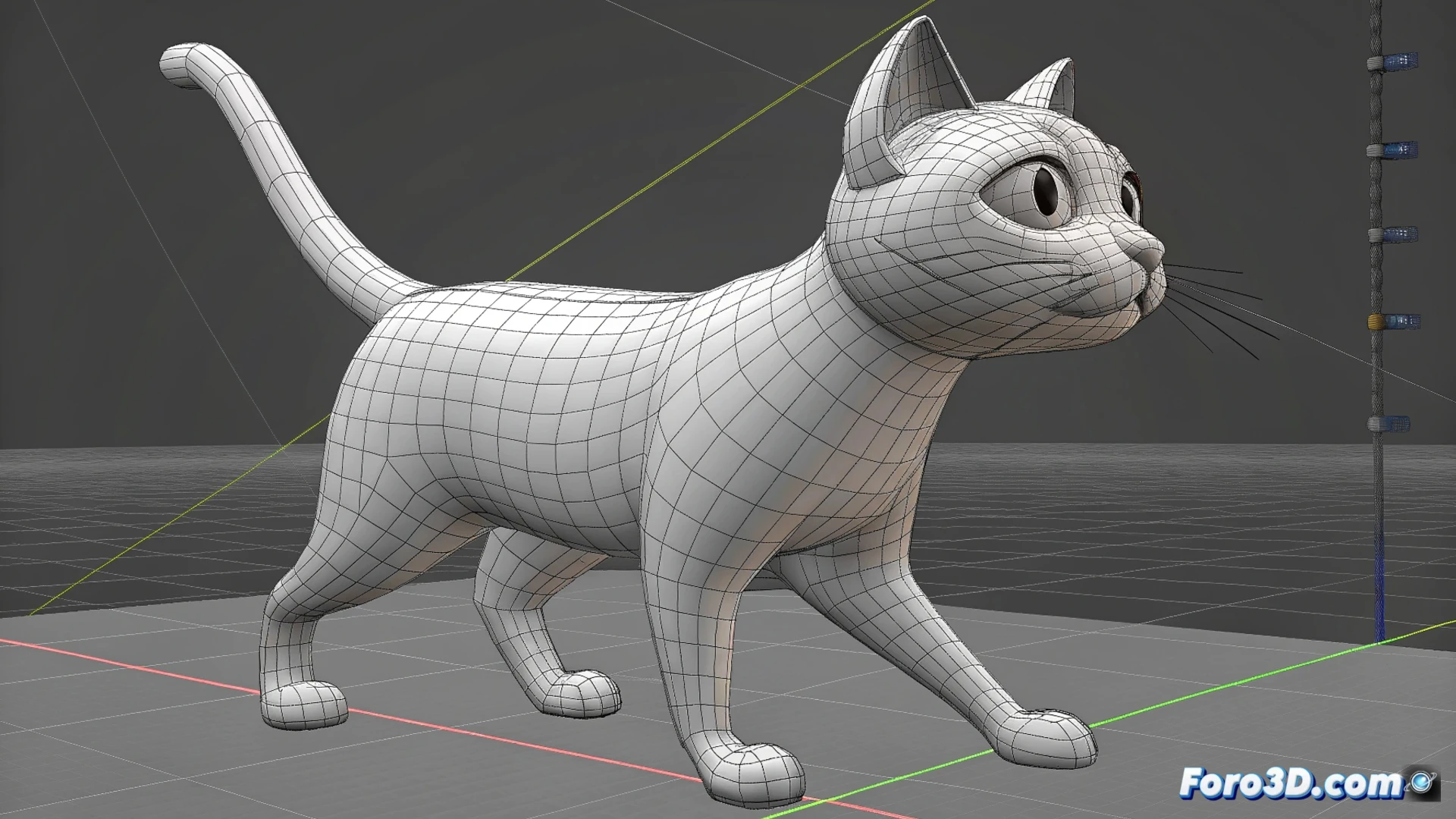
モデルとボーンシステムの準備
アニメーションを開始する前に、ボーン構造またはアーマチュアが準備された猫のモデルが必要です。組み込みのアセットから取得するか、外部モデルをインポートできます。主要な目標は、四肢、脊柱、頭部を独立して操作できるスケルトンを持つことです。リグを動かしたときの変形が滑らかで信ぴょう性があるように、メッシュのウェイト割り当てが正しいことを確認してください。
初期の重要なポイント:- アニメーションに適した猫のモデルを選択またはインポートします。
- 脚、脊柱、尾、頭のためのボーンを持つリグを設定します。
- モデルの皮膚がボーンに自然に追従するようにpaint weightsまたは影響頂点を調整します。
しっかりしたリグはどんなキャラクターアニメーションの基盤です;それがなければ、動きは硬く人工的に見えます。
基本的な歩行サイクルの設定
タイムラインまたはドープシートエディタを開き、アニメーションのフレームレートを定義します。最初に、前脚と後脚の反対側が前進したキー poseを作成します。次に、それを数フレーム後に複製して反転し、完全なステップの感覚を生み出します。ポーズ間のトランジションを磨くために、アニメーションカーブエディタ(Graph Editor)を使用して各ボーンの動きの補間を滑らかにし、硬さを除去します。脊柱と頭部に微妙な揺れを追加してリアリズムを高めます。
サイクルを作成するステップ:- 脚が反対位置にある初期ポーズを定義します。
- ポーズを複製して反転し、2番目のキー・ステップを作成します。
- Graph Editorを使用してアニメーションカーブを滑らかにし、動きをより有機的にします。
- 背中と頭部に横方向の動きを追加して自然な揺れをシミュレートします。
アニメーションの磨き上げと現実的な詳細の追加
リアリズムの最終層はセカンダリームーブメントから来ます。尾を脚のリズムに反対して揺れるようにアニメーション化します。脚の逆キネマティクス (IK)を調整して、接触時に脚が地面に完全に接地し、沈み込んだり浮いたりしないようにします。アニメーションを連続ループでテストし、ボーンの軌道を調整したり制約を使用したりして脚の滑りを修正します。前脚と後脚の協調に特別な注意を払い、不自然な歩き方を避けます。
このプロセスで最も価値のあるツールは忍耐です。本物の猫の参考映像を観察し、アニメーションを繰り返すことは、猫らしい本質を捉え、ぎこちない歩き方を避けるために不可欠なステップです。🎬