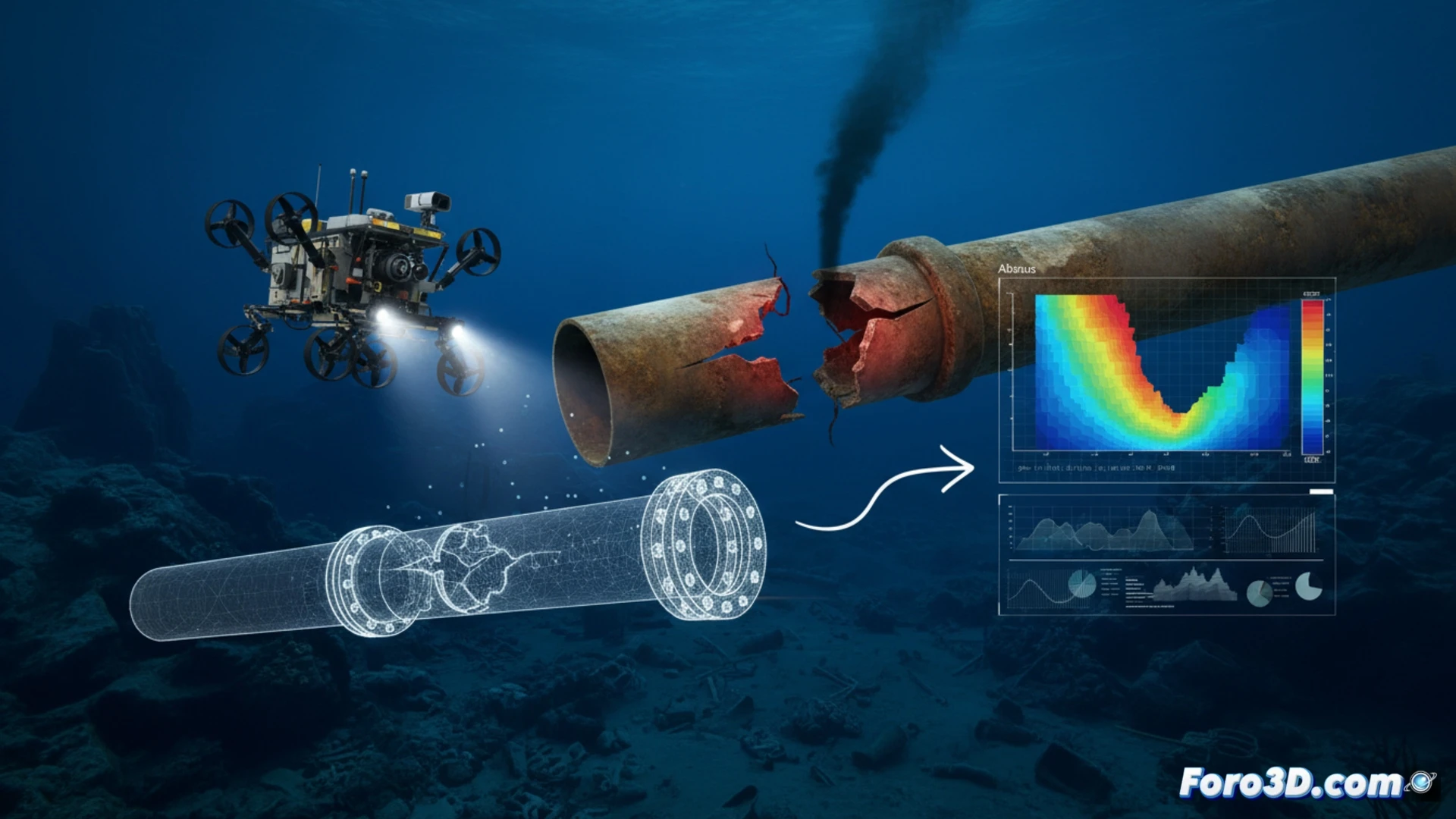
深海のトランスオーシャンパイプラインにおける大深度原油漏洩が、工学鑑識調査を引き起こした。チームは、円形スキャンソナーと短距離水中フォトグラメトリを搭載したROVを展開した。目的は、破損したフレキシブルジョイントの正確な形状を捉え、高忠実度の3Dモデルを構築することだった。このモデルは、Abaqusでの疲労シミュレーションの基礎として、亀裂の根本原因を特定するために使用された。
Abaqusによる疲労モデリングとシミュレーション 🔧
ソナーとフォトグラメトリから得られた点群は、CloudCompareで処理され、ノイズを除去し、クリーンなサーフェスメッシュを生成した。このメッシュはAbaqus/CAEにインポートされ、ジョイントと隣接するパイプの材料の有限要素モデルが定義された。記録された海底流に対応する周期的荷重が適用されたが、初期モデルでは亀裂は示されなかった。マッピングされていない流れが共振振動を引き起こしていることを特定するために、周波数モーダル解析を導入する必要があった。荷重周波数をその調和値に調整すると、材料のS-N曲線(応力-寿命)に基づく疲労シミュレーションは、観測された亀裂の位置と方向を正確に予測し、ROVの実データに対してモデルを検証した。
フィールドデータによる検証からの教訓 📊
このケースは、Abaqusでの疲労シミュレーションは、入力されるデータと同程度に信頼できることを示している。成功の鍵は、ジョイントの実際の形状を捉えるための水中フォトグラメトリの統合であり、これは製造公差のために設計図面には反映されていなかった詳細である。分析により、マッピングされていない流れが存在するだけでなく、その周波数がパイプ区間の固有振動数と一致することが明らかになった。ROVの3Dモデルとシミュレーションの相互検証がなければ、共振疲労の根本原因は見逃されていただろう。これは、目視検査と数値解析を結びつける必要性を強調している。
Abaqusに水中の圧力と温度データを統合し、大深度パイプラインジョイントにおける疲労亀裂の発生と進展を正確にモデル化する方法
(追伸: 材料の疲労は、10時間のシミュレーション後のあなたの疲労と同じです。)