Un robot autonomo per la gestione dei bagagli ha investito un passeggero in una terminal aeroportuale durante le ore di forte insolazione. L'indagine forense si è concentrata sulla ricostruzione del campo visivo del sistema di telecamere stereoscopiche del robot per determinare se il riflesso del sole sul pavimento lucido abbia generato una zona di errore di profondità. Questo caso rappresenta una pietra miliare nell'applicazione delle tecnologie 3D per l'analisi di incidenti con sistemi autonomi, dove la percezione visiva è venuta meno a causa di condizioni ambientali estreme.
Flusso di lavoro forense: fotogrammetria, LiDAR e simulazione in Unreal Engine 5 🛠️
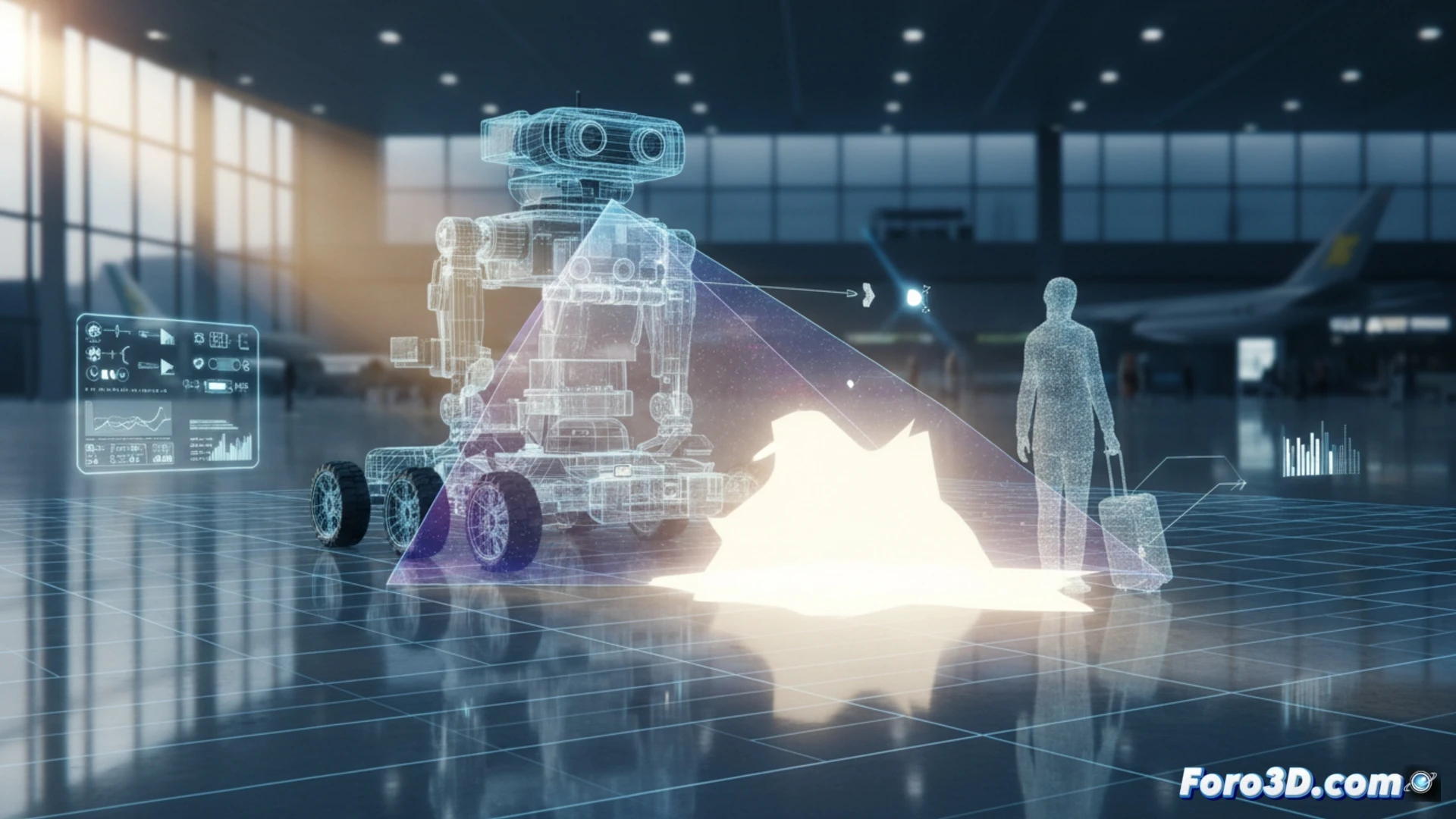
Il processo è iniziato con l'acquisizione dei dati dell'area dell'incidente tramite scansione LiDAR e fotogrammetria con RealityCapture, generando una nuvola di punti ad alta densità del pavimento e della zona d'impatto. In CloudCompare, i dati ambientali sono stati allineati con il modello CAD del robot per ricreare la posizione esatta dei suoi sensori al momento dell'incidente. Successivamente, in Unreal Engine 5, è stato simulato il campo visivo stereoscopico, applicando un materiale riflettente al pavimento e configurando l'illuminazione solare reale. La simulazione ha confermato che il riflesso produceva un gradiente di luminosità che saturava i pixel in un'area specifica, annullando la disparità binoculare e generando un punto cieco ottico di 40 cm di diametro proprio dove si trovava il passeggero.
Lezioni per la progettazione di sensori nella robotica autonoma 🤖
Questa perizia dimostra che i sistemi di visione stereoscopica, sebbene robusti in condizioni controllate, sono vulnerabili a superfici speculari e cambiamenti estremi di illuminazione. La metodologia applicata, combinando fotogrammetria, allineamento di nuvole di punti e simulazione di sensori, stabilisce un pipeline forense riproducibile per futuri incidenti con robot autonomi. La validazione dell'ipotesi del riflesso solare obbliga i produttori a incorporare ridondanza sensoriale, come LiDAR a tempo di volo, per mitigare questi punti ciechi ottici in ambienti aeroportuali.
Come può una ricostruzione 3D forense identificare l'influenza dell'occlusione visiva da ombre proiettate sulla traiettoria di un robot autonomo durante un sinistro in un aeroporto?
(PS: Nel pipeline forense, la cosa più importante è non mescolare le prove con i modelli di riferimento... o ti ritroverai con un fantasma sulla scena.)