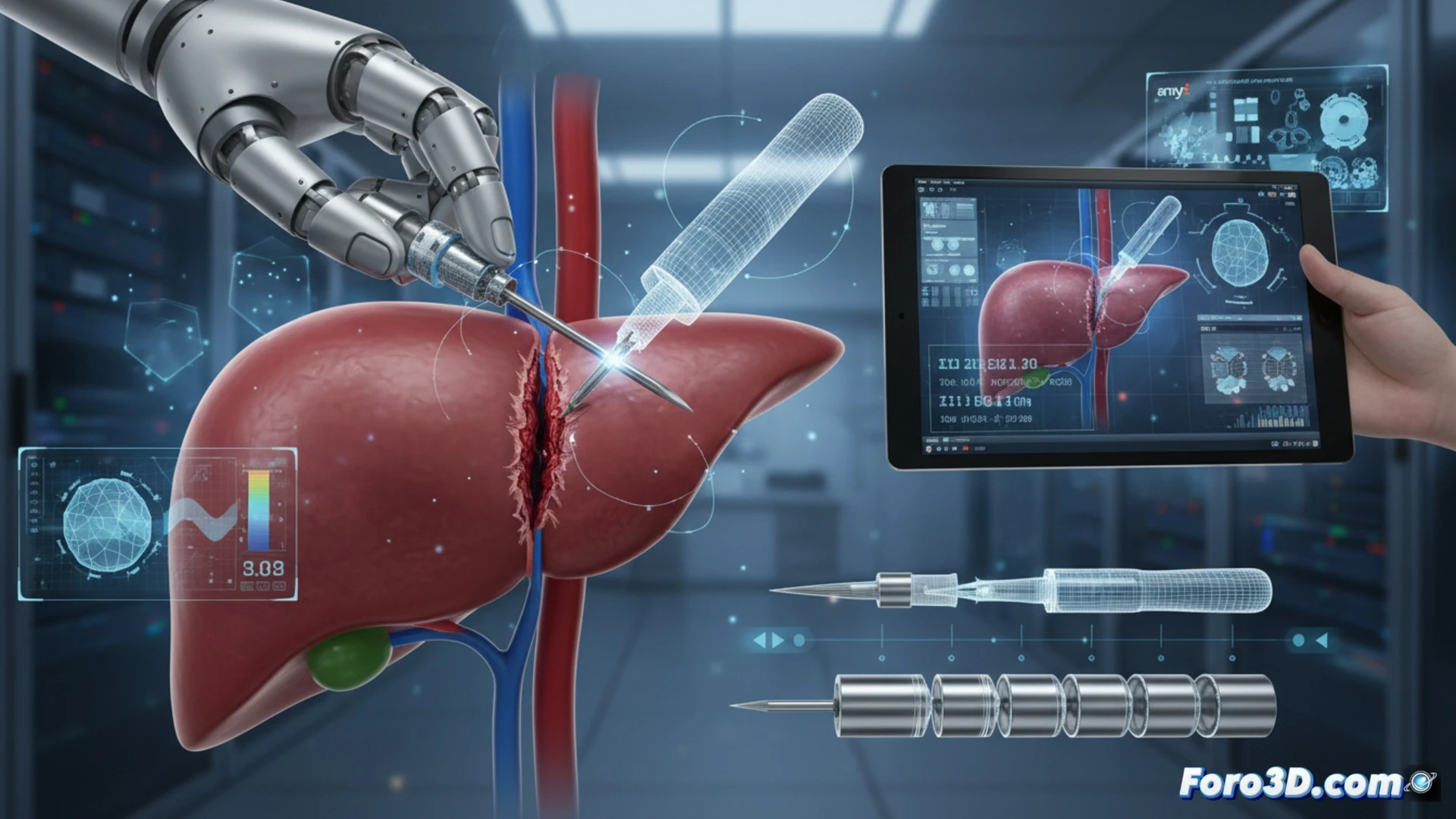
Un robot chirurgico autonomo, progettato per eseguire biopsie epatiche di alta precisione, ha provocato una lacerazione vascolare durante un intervento. L'incidente, inizialmente attribuito a un errore software, è stato sottoposto a una perizia forense 3D. L'indagine ha combinato simulazioni agli elementi finiti in Ansys con la scansione metrica dell'ago per ricostruire la dinamica del guasto, dimostrando che la causa principale non era algoritmica, ma meccanica e tissutale.
Simulazione agli elementi finiti e scansione dell'ago 🧬
Il team forense ha digitalizzato la geometria esatta dell'ago tramite scansione 3D e l'ha integrata in un modello agli elementi finiti in Ansys. È stata riprodotta l'anisotropia del parenchima epatico, caratterizzata da fibre di collagene con rigidità direzionale variabile. La simulazione ha dimostrato che, attraversando un lobo epatico con elevata densità fibrotica, la punta dell'ago ha subito un momento flettente asimmetrico. Questa coppia, non contemplata nell'algoritmo di guida rigida del robot, ha deviato la traiettoria di 4,2 millimetri, sufficienti per recidere un vaso portale vicino.
Lezioni per la robotica chirurgica autonoma 🤖
La perizia evidenzia che gli attuali modelli di controllo sottostimano l'interazione biomeccanica del tessuto vivo. Per evitare future iatrogenie, gli algoritmi di navigazione autonoma devono incorporare dati di anisotropia tissutale ottenuti tramite elastografia preoperatoria o simulazione in tempo reale. L'integrazione di gemelli digitali epatici, come quelli generati in Materialise Mimics, consentirebbe di regolare dinamicamente la forza e l'angolo di inserimento, colmando il divario tra la rigidità teorica del modello e la complessità reale dell'organo.
Quali lezioni sulla progettazione di sensori di feedback nei robot chirurgici autonomi si possono trarre dalla perizia 3D di questo guasto all'ago epatico per prevenire future lacerazioni vascolari.
(PS: e se l'organo stampato non pulsa, puoi sempre aggiungergli un motorino... è uno scherzo!)