Il nuovo robot umanoide di Tesla, Optimus Gen 2, non è solo un esercizio di ingegneria meccanica; è un trionfo del software di simulazione 3D. Per ottenere che una macchina di 63 kg cammini con fluidità e manipoli un uovo senza romperlo, Tesla ha dovuto ricreare ogni giunto e ogni sensore in un ambiente virtuale. Questo gemello digitale addestra l'IA robotica attraverso prove ed errori, permettendo al modello fisico di ereditare movimenti raffinati senza rischiare componenti reali.
Modellazione biomeccanica e simulazione di sensori tattili 🤖
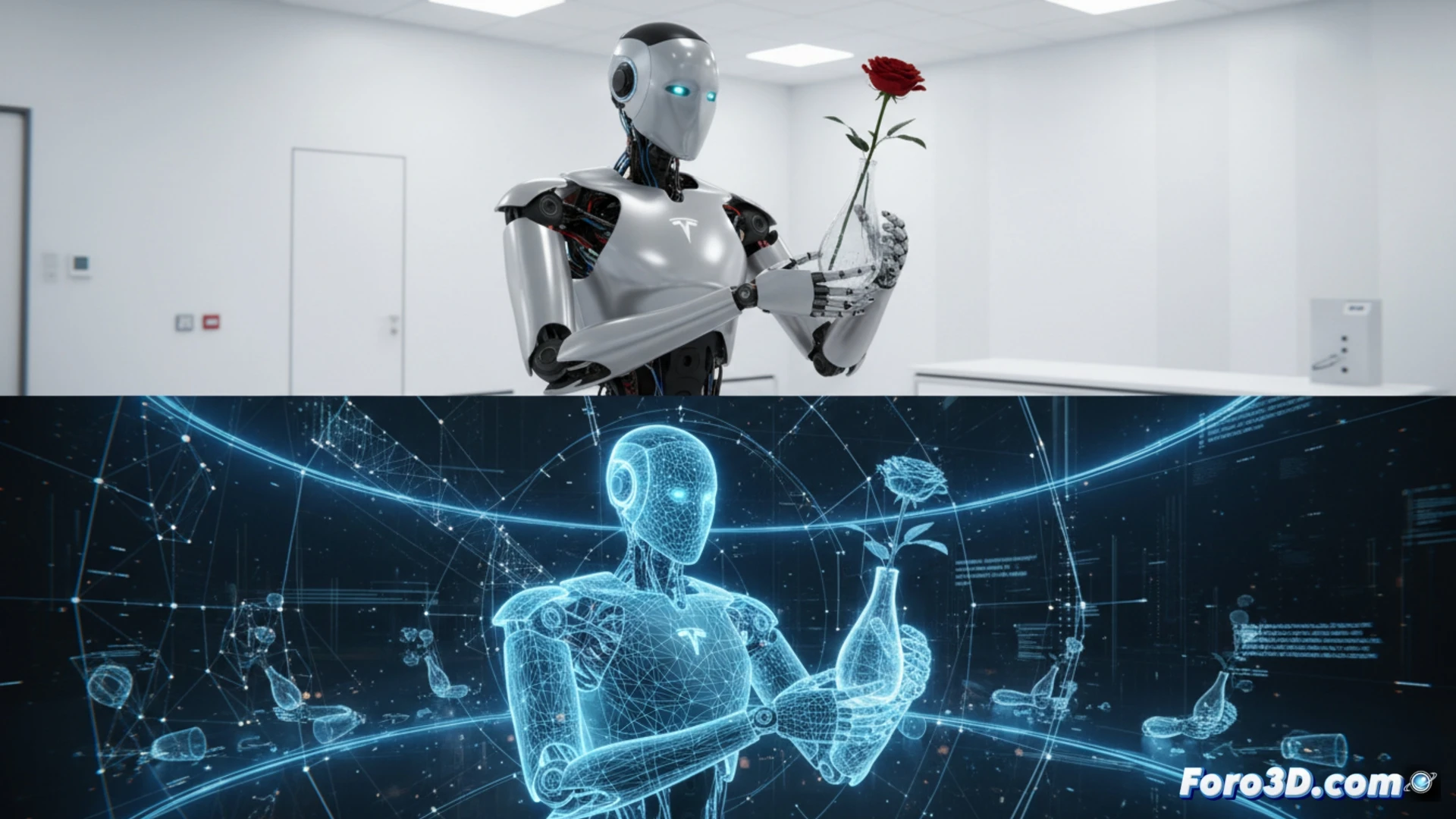
Il salto qualitativo del Gen 2 risiede nel suo controllo biomeccanico. Per realizzarlo, gli ingegneri costruiscono un modello 3D del robot che replica il suo centro di massa e l'inerzia di ogni segmento. Su questo modello, vengono eseguite simulazioni di fisica inversa per prevedere traiettorie di equilibrio. La chiave sta nei sensori tattili virtuali: nell'ambiente 3D, si simula la deformazione di un cuscinetto quando si preme un oggetto. L'IA impara a leggere questi dati sintetici per regolare la forza di presa, traducendo un segnale digitale in un tatto quasi umano.
Visualizzazione 3D come scorciatoia verso l'autonomia 🚀
La validazione tramite visualizzazione 3D permette a Tesla di iterare più velocemente che con prototipi fisici. Simulando cadute e correzioni di postura in un ambiente renderizzato, il software di controllo matura senza usura meccanica. Questo non solo accelera lo sviluppo, ma ridefinisce l'automazione: il robot non è più un esecutore rigido, ma un sistema che comprende il proprio corpo in 3D. Il prossimo passo sarà che il gemello digitale impari da solo a navigare intere fabbriche prima che Optimus faccia il suo primo passo reale.
Come l'uso di un gemello digitale permette a Optimus Gen 2 di eseguire compiti di precisione senza danneggiare oggetti fragili, e quali vantaggi offre questa simulazione rispetto ai metodi tradizionali di addestramento robotico?
(PS: Simulare robot è divertente, finché non decidono di non seguire i tuoi ordini.)