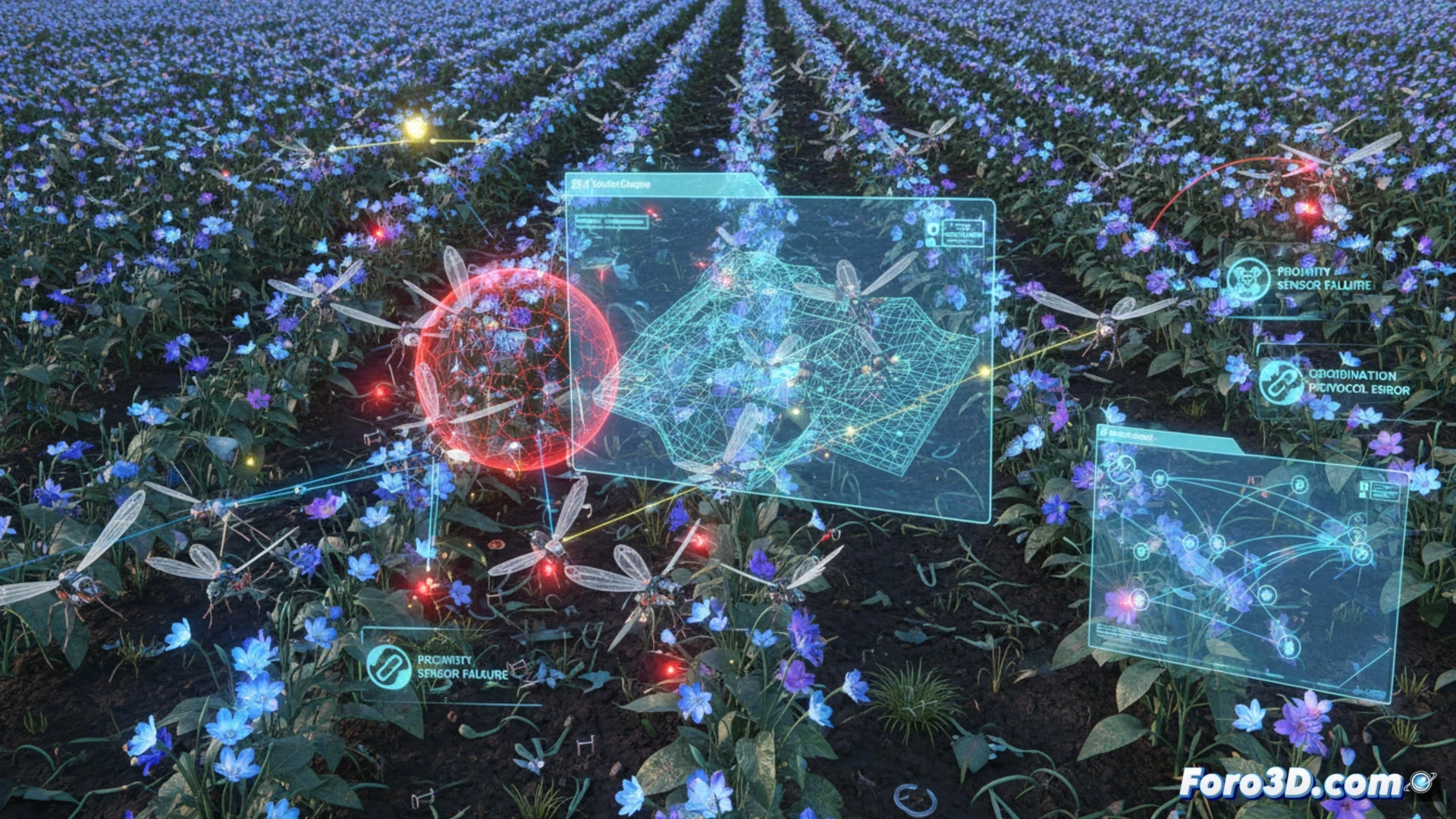
Uno sciame di micro-droni impollinatori ha distrutto un raccolto sperimentale a seguito di un malfunzionamento catastrofico. La ricostruzione 3D dell'incidente, utilizzando strumenti come RealityCapture e 3ds Max, consente di analizzare le traiettorie di volo e i dati dei sensori di prossimità. Questo caso espone vulnerabilità critiche nell'automazione delle colture intensive, dove il coordinamento tra robot è essenziale per evitare collisioni e garantire un'impollinazione efficace.
Simulazione di traiettorie e sensori in V-REP e Gazebo 🤖
Per comprendere il guasto, è necessario modellare il comportamento dello sciame in ambienti di simulazione robotica. V-REP consente di ricreare la fisica del volo dei micro-droni e programmare algoritmi di evitamento degli ostacoli basati su sensori ultrasonici o LiDAR. Gazebo, d'altra parte, offre un ambiente più realistico per testare l'interazione tra più agenti e la coltura. In questo caso, la ricostruzione 3D suggerisce che un errore nella calibrazione dei sensori di prossimità ha causato una desincronizzazione nello sciame, portando i droni a collidere tra loro e con le piante, invece di impollinarle.
Lezioni per la robotica agricola 🌱
Il guasto non è un incidente isolato, ma un riflesso delle sfide attuali nella robotica agricola. La dipendenza da sensori a basso costo per mantenere la sostenibilità economica degli sciami introduce rischi di malfunzionamento. La simulazione preventiva in V-REP e Gazebo deve includere scenari di rumore del sensore e perdita di comunicazione. Solo attraverso un'analisi 3D dettagliata e una validazione rigorosa degli algoritmi di volo potremo evitare che il prossimo raccolto sperimentale si trasformi in un campo di detriti.
Che ruolo hanno giocato gli algoritmi di evitamento delle collisioni in 3D nella propagazione del guasto dello sciame e come avrebbe potuto essere modellato il loro comportamento caotico durante la ricostruzione virtuale dell'incidente?
(PS: Simulare robot è divertente, finché non decidono di non seguire i tuoi ordini.)