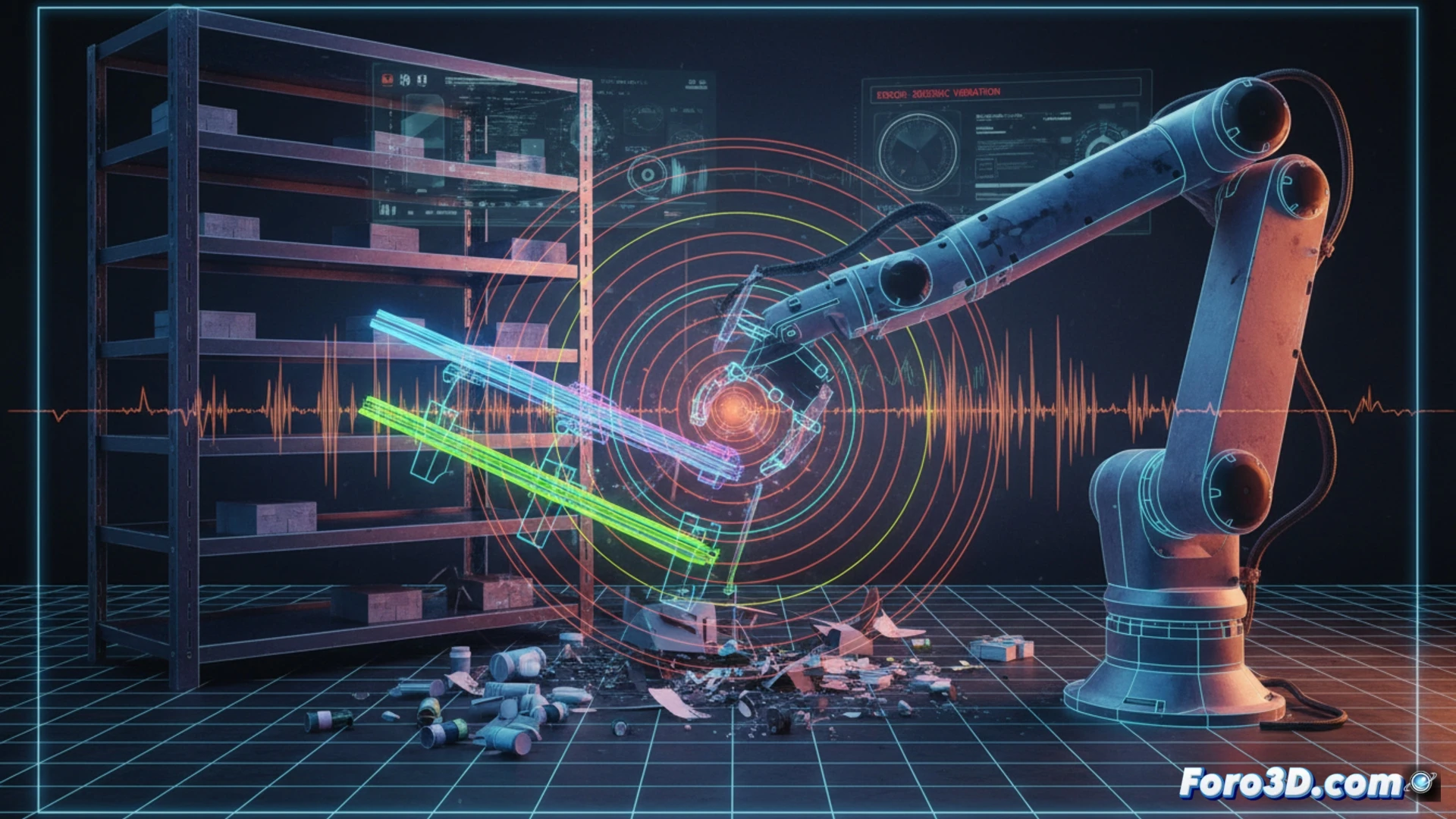
L'incidente è avvenuto in una farmacia robotizzata ad alta velocità: il braccio robotico ha violentemente colliso contro gli scaffali del sistema di stoccaggio verticale. A prima vista, sembrava un errore di programmazione, ma il team di manutenzione ha sospettato un fattore esterno. L'analisi 3D ha rivelato deformazioni millimetriche nelle guide, causate da vibrazioni sismiche non registrate dai sensori standard dell'edificio.
Metodologia di ispezione con RoboGuide, RealWorks e CloudCompare 🤖
La diagnosi è iniziata in RoboGuide, dove è stata simulata la traiettoria originale del braccio. Confrontandola con i dati di telemetria del PLC, è stata rilevata una deviazione di 2,3 mm sull'asse Z. Per confermare la causa, le guide sono state scansionate con uno scanner laser Trimble e le nuvole di punti sono state elaborate in Trimble RealWorks. L'allineamento delle superfici ha mostrato un rigonfiamento nella guida sinistra. Utilizzando CloudCompare, è stato eseguito un confronto delle distanze (M3C2) tra lo stato attuale e il progetto CAD originale, calcolando deformazioni fino a 1,8 mm nella zona d'impatto. Blender è stato utilizzato per generare un'animazione forense che correla il momento della vibrazione sismica con la traiettoria dell'effettore finale.
Lezioni per la calibrazione di sistemi automatizzati ⚙️
Questo caso dimostra che i sistemi robotizzati in farmacia richiedono un monitoraggio strutturale che vada oltre i sensori interni del robot. Le vibrazioni sismiche di bassa ampiezza, anche se non danneggiano l'edificio, possono scalibrare le guide di precisione. Si raccomanda di integrare accelerometri alla base degli scaffali e di eseguire scansioni 3D periodiche con CloudCompare per rilevare deformazioni sub-millimetriche prima che generino collisioni. La correzione ha comportato il riallineamento degli ancoraggi delle guide e la ricalibrazione del braccio in RoboGuide con una nuova mappa di compensazione degli errori.
Quanto è affidabile il modello di analisi 3D delle collisioni per prevedere le traiettorie di un braccio robotico farmaceutico quando si trova ad affrontare vibrazioni sismiche non modellate inizialmente nell'ambiente della farmacia robotizzata?
(PS: Simulare robot è divertente, finché non decidono di non seguire i tuoi ordini.)