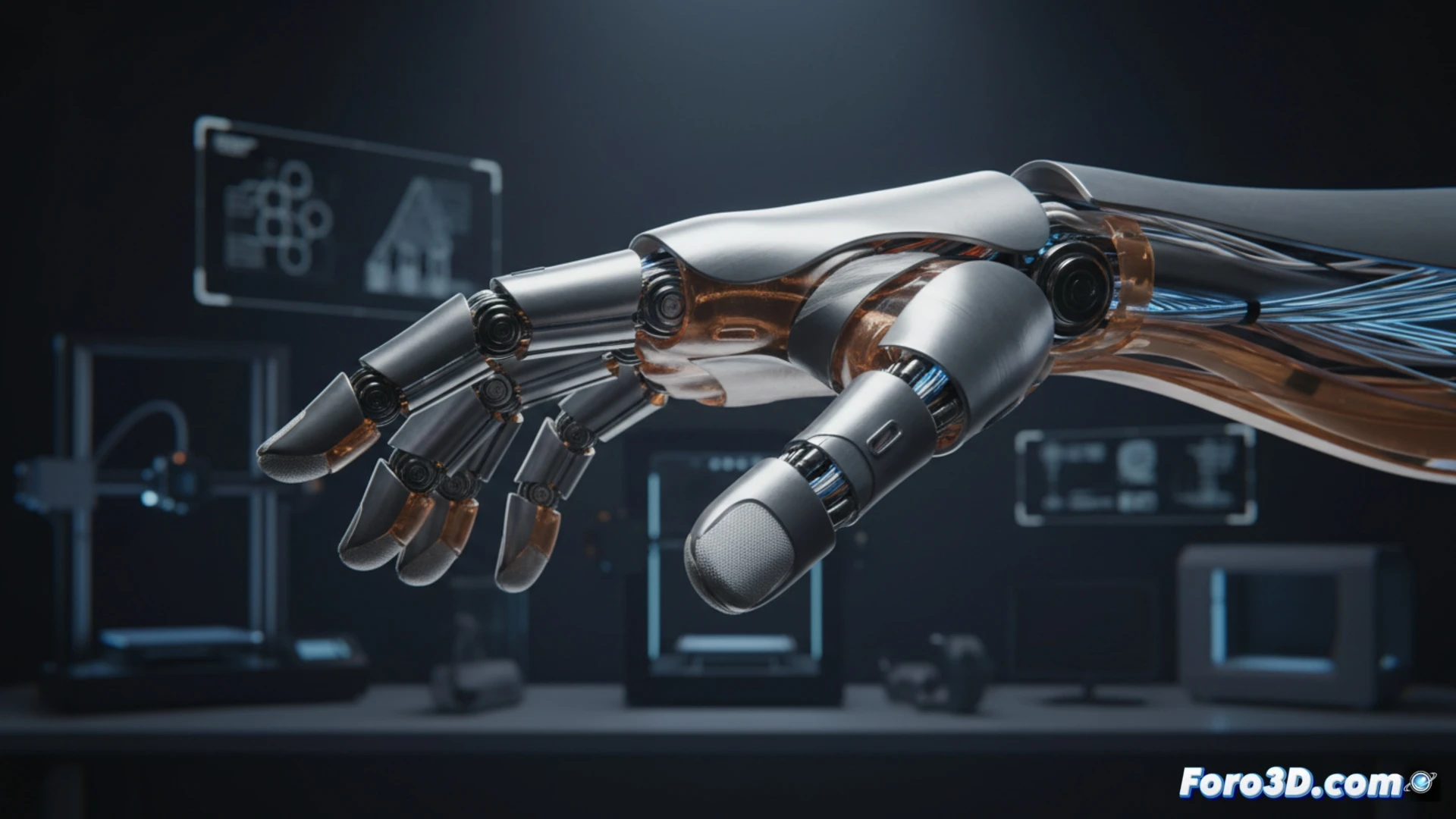
Ricercatori dell'ETH Zurich hanno compiuto un passo chiave nella robotica morbida presentando una mano robotica avanzata fabbricata mediante stampa 3D. Il suo design combina uno scheletro rigido con articolazioni morbide e tendini artificiali, imitando la complessità anatomica umana. Questo approccio permette movimenti più naturali e adattabili, superando le limitazioni delle pinze rigide tradizionali e avvicinandoci a robot con una manipolazione di oggetti davvero destruente.
Integrazione di rigido e morbido: il ruolo chiave del modellato 3D 🤖
L'innovazione tecnica risiede nell'integrazione monolitica di materiali duri e morbidi durante il processo di stampa 3D. Il modellato digitale preciso è cruciale per progettare lo scheletro interno rigido, le articolazioni flessibili e i canali attraverso i quali si alloggiano i tendini artificiali. Questi tendini, azionati da servomotori esterni, simulano il sistema muscolare, conferendo alla mano un range di movimento superiore e la capacità di adattarsi alla forma degli oggetti. Questa fabbricazione additiva permette di prototipare rapidamente design complessi e bioispirati che sarebbero impraticabili con metodi tradizionali.
Un futuro di robot più abili e versatili 🚀
Questo avanzamento non è solo un traguardo accademico. La destrezza e la morbidezza di movimento che fornisce questa tecnologia apre nuove possibilità nell'automazione industriale per manipolare componenti fragili, nella robotica di assistenza per interagire con le persone in modo sicuro, e in ambienti di esplorazione remota. La stampa 3D si consolida come lo strumento fondamentale per materializzare design robotici che, ispirandosi alla natura, finalmente riescono a emularne l'efficacia e l'eleganza.
Come sta rivoluzionando la stampa 3D il design e la funzionalità delle mani robotiche bioispirate nella robotica morbida? 🤔
(PD: Simulare robot è divertente, finché decidono di non seguire i tuoi ordini.)