Il recente incidente in cui un robot minerario di grande tonnellaggio ha subito una rottura catastrofica del suo braccio articolato durante un'operazione di estrazione ha messo in luce i guasti meccanici in ambienti estremi. Questo tipo di macchinario, progettato per sopportare carichi ciclici e condizioni abrasive, si è guastato improvvisamente, suggerendo un collasso per fatica dei materiali o un sovraccarico non rilevato dal sistema di controllo. Analizzare questo evento dal punto di vista ingegneristico ci permette di capire come ottimizzare la progettazione e la supervisione di queste attrezzature.
Fatica dei materiali, sovraccarico ed errori software nel guasto ⚙️
Le cause tecniche di questa rottura possono essere suddivise in tre fronti principali. Primo, la fatica dei materiali: il robot minerario opera sotto vibrazioni e urti costanti, generando microfratture in leghe di acciaio o alluminio che, col tempo, portano a una frattura fragile. Secondo, il sovraccarico operativo: se il sistema di sensori non ha calibrato correttamente il peso del materiale estratto o il robot ha superato la sua coppia massima in una rotazione forzata, lo stress su attuatori e giunti ha superato il limite elastico. Terzo, un possibile errore software nel controllo delle traiettorie, dove un anello di retroazione difettoso ha ordinato un movimento brusco senza compensare l'inerzia, generando un picco di tensione nel punto critico della struttura.
Come la simulazione 3D e i gemelli digitali prevengono questi guasti 🛠️
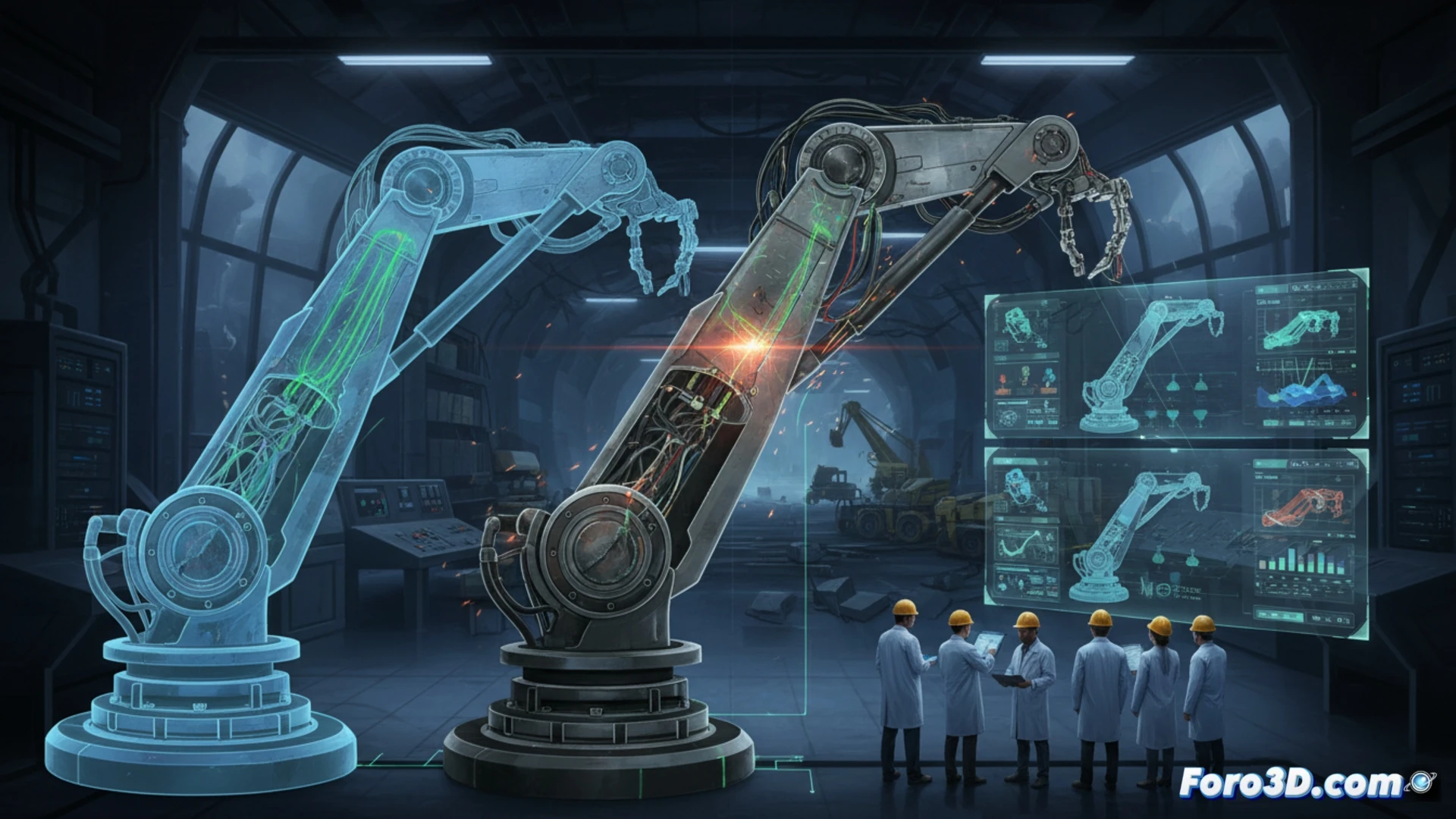
La simulazione tramite gemelli digitali è lo strumento chiave per prevedere e prevenire questa rottura. Modellando il robot in 3D con dati di tensione-deformazione, è possibile visualizzare mappe di calore che indicano i punti critici dove la fatica si accumula, come i giunti a sfera o le saldature del braccio. Un gemello digitale consente di eseguire migliaia di cicli di carico virtuali senza usurpare l'attrezzatura reale, identificando i sovraccarichi prima che si verifichino. Inoltre, integra i dati dei sensori IoT per avvisare su vibrazioni anomale, fermando la macchina al primo segno di microfrattura, evitando così rotture catastrofiche nell'estrazione mineraria automatizzata.
Come può un gemello digitale prevedere e prevenire con precisione le modalità di guasto per fatica in un braccio articolato di un robot minerario prima che si verifichi una rottura catastrofica, considerando variabili come il carico dinamico e l'abrasione dell'ambiente sotterraneo?
(NDR: Simulare robot è divertente, finché non decidono di non seguire i tuoi ordini.)