Kengoro: il robot umanoide che suda come una persona
Nel Laboratorio JSK dell'Università di Tokyo, gli ingegneri non cercano solo di costruire macchine, ma di replicare la vita. La loro creazione più avanzata, Kengoro, è uno sforzo per copiare con precisione il complesso sistema di ossa, muscoli e tendini di un essere umano. Questo approccio radicale ridefinisce come si progetta e controlla un robot, allontanandosi dalla rigidità tradizionale. 🤖
Uno scheletro che transpira per non surriscaldarsi
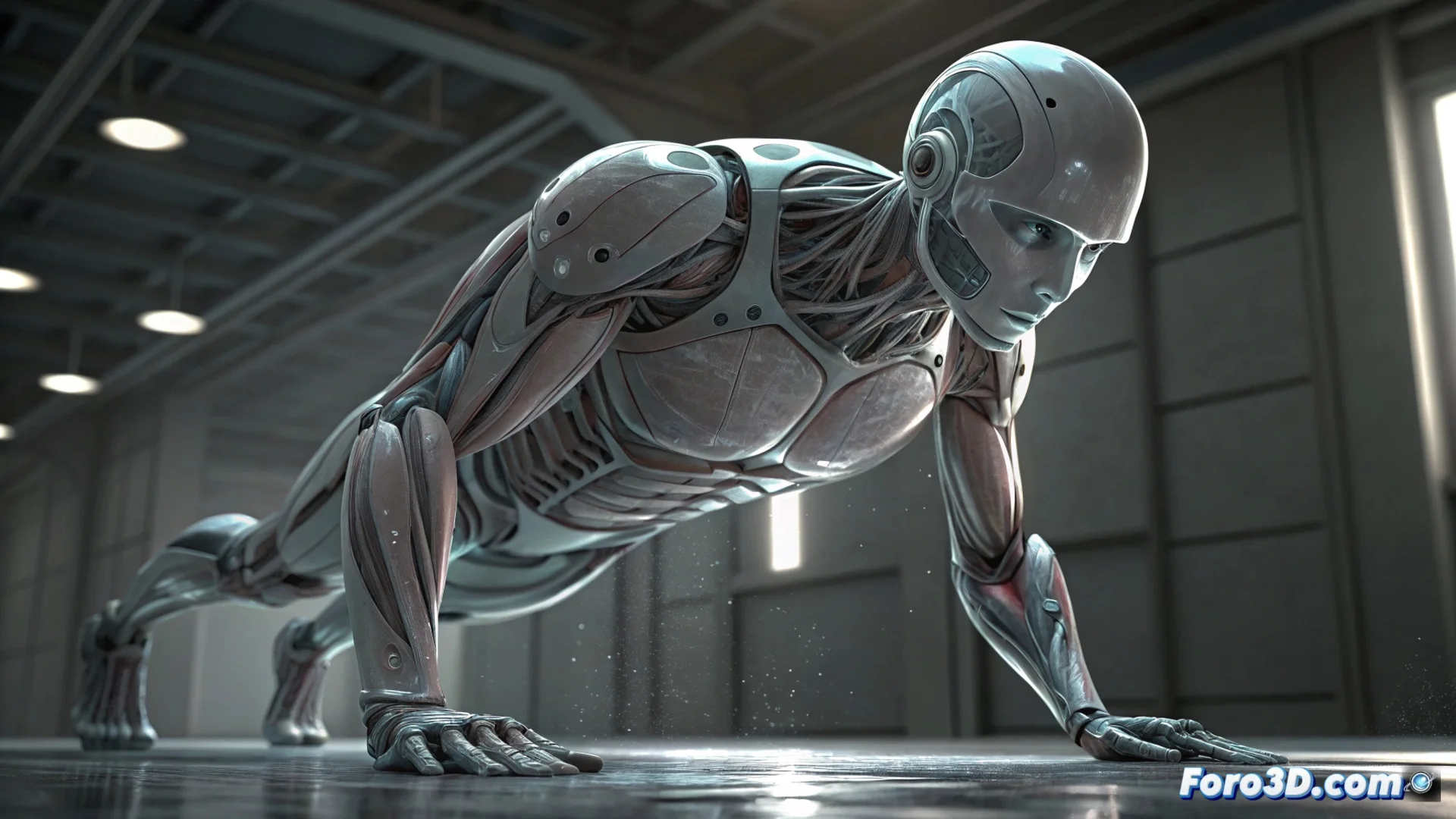
La sfida tecnica maggiore di Kengoro è stata gestire il calore generato dai suoi 108 motori indipendenti. La soluzione non è venuta da ventole o dissipatori grandi, ma da imitare un processo biologico. I ricercatori hanno implementato un sistema di raffreddamento per evaporazione. L'acqua circola attraverso il telaio scheletrico di alluminio poroso, filtra verso la superficie e si evapora, estraendo calore in modo efficiente, proprio come il sudore raffredda il corpo.
Vantaggi chiave del raffreddamento per 'sudore':- Permette al robot di funzionare in modo continuo per più tempo, anche sotto carichi pesanti come fare flessioni.
- Elimina la necessità di componenti di raffreddamento voluminosi che limiterebbero il movimento e il design.
- Distribuisce il raffreddamento in modo uniforme su tutta la struttura, proteggendo gli attuatori critici.
Questo metodo di raffreddamento è un cambiamento di paradigma. Non aggiungiamo peso, usiamo la struttura stessa come sistema termico.
Movimento organico grazie a una colonna vertebrale flessibile
Priorizzare un'anatomia bioispirata conferisce a Kengoro capacità di movimento eccezionali. La sua colonna vertebrale flessibile è fondamentale per bilanciare, assorbire impatti ed eseguire gesti dinamici che i robot con torsioni rigide non possono realizzare. Questa versatilità apre nuove frontiere per studiare come si muovono le persone.
Applicazioni dirette di questo design:- Avanzare nel campo della robotica assistenziale, creando esoscheletri o protesi con movimenti più naturali.
- Comprendere meglio la biomeccanica umana per prevenire infortuni o migliorare le prestazioni atletiche.
- Fornire una piattaforma fisica realistica per testare algoritmi di controllo e simulazione.
Il futuro: dall'imitare movimenti alla replicare sensazioni
Kengoro rappresenta un salto verso robot che non solo sembrano, ma funzionano anche come organismi viventi. Il passo logico successivo in questa imitazione potrebbe integrare sistemi sensoriali che permettano al robot di percepire il suo ambiente e stato interno in modo più ricco. Il progetto getta le basi per macchine che interagiscano con il mondo in modo genuinamente organico e adattabile. 🔬