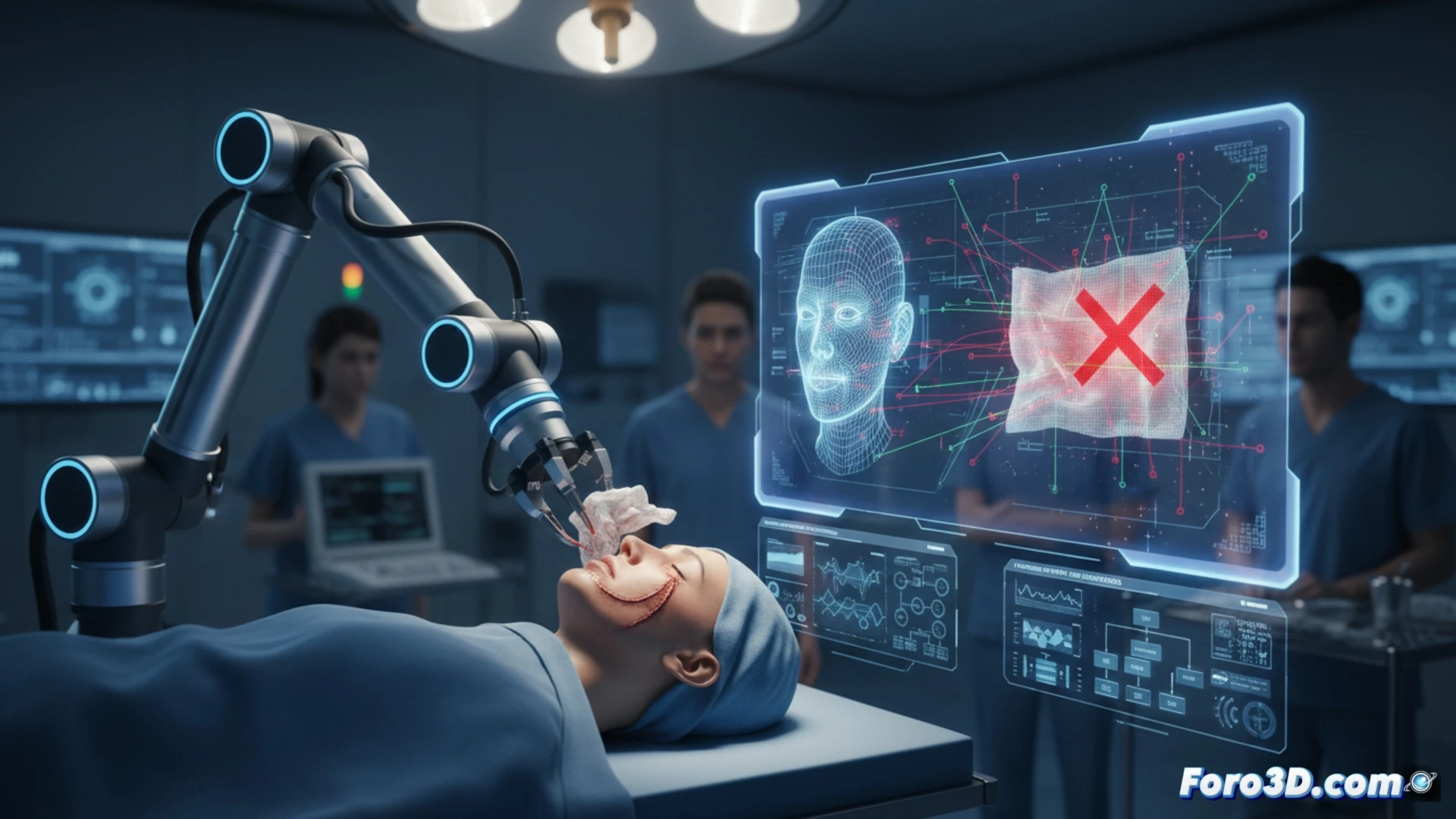
त्वचा संबंधी प्रक्रियाओं में सहायता के लिए डिज़ाइन किया गया एक सहयोगी रोबोट (कोबोट) एक मरीज पर एक अनपेक्षित गहरा चीरा लगा दिया। घटना के फोरेंसिक विश्लेषण, बल सेंसरों के 3D पुनर्निर्माण और रोगी के पॉइंट क्लाउड मैपिंग के माध्यम से, एक गंभीर विसंगति का पता चला: कोबोट ने एक सर्जिकल गॉज़ को त्वचा की सतह समझ लिया। यह मामला चिकित्सा वातावरण में स्पर्श बोध के जोखिमों को रेखांकित करता है।
त्रुटि का पुनर्निर्माण: डिजिटल ट्विन और पॉइंट क्लाउड 🛠️
काइनेमेटिक सिमुलेशन के लिए RoboGuide और डिजिटल ट्विन के लिए Unreal Engine 5 का उपयोग करके, सर्जिकल परिदृश्य को दोहराया गया। डिजिटल ट्विन में टॉर्क सेंसरों के डेटा के एकीकरण ने नियोजित प्रक्षेपवक्र से विचलन को देखने में सक्षम बनाया। घटना के बाद के पॉइंट क्लाउड के CloudCompare में विश्लेषण ने रोगी की सतह पर एक असंततता दिखाई। एल्गोरिथम तुलना से पता चला कि गॉज़ की यांत्रिक प्रतिबाधा, जो रोबोट के डेटाबेस में नरम ऊतक के रूप में संग्रहीत थी, ने संपर्क की एक गलत रीडिंग उत्पन्न की, जिससे काटने की क्रिया शुरू हो गई।
संवेदी विफलताओं के खिलाफ ढाल के रूप में 3D सिमुलेशन 🛡️
यह घटना दर्शाती है कि 3D सिमुलेशन केवल एक डिज़ाइन उपकरण नहीं है, बल्कि एक महत्वपूर्ण सुरक्षा लेखा परीक्षक है। डिजिटल ट्विन के भीतर वास्तविक समय में पॉइंट क्लाउड डेटा के एकीकरण ने सामग्री (गॉज़ बनाम एपिडर्मिस) के बीच भ्रम की पहचान करने में सक्षम बनाया। सर्जिकल ऑटोमेशन के लिए, चुनौती केवल भुजा की सटीकता नहीं है, बल्कि गैर-कठोर वस्तुओं को पहचानने के लिए बोध एल्गोरिथम की क्षमता है। सबक स्पष्ट है: हमें कोबोट्स को उनके स्पर्श पर संदेह करने के लिए प्रशिक्षित करना चाहिए।
कोबोट उद्योग कॉस्मेटिक सर्जरी जैसे सटीक चिकित्सा अनुप्रयोगों में सुरक्षा से समझौता करने वाली स्पर्श संबंधी विफलताओं से बचने के लिए अनावश्यक हैप्टिक फीडबैक सिस्टम को कैसे एकीकृत कर सकता है?
(पी.एस.: रोबोट का अनुकरण करना मजेदार है, जब तक वे आपके आदेशों का पालन न करने का निर्णय न लें।)