एक स्वायत्त सामान प्रबंधन रोबोट ने उच्च धूप के घंटों के दौरान हवाई अड्डे के टर्मिनल पर एक यात्री को टक्कर मार दी। फोरेंसिक जांच रोबोट के स्टीरियोस्कोपिक कैमरा सिस्टम के दृश्य क्षेत्र को पुनर्निर्मित करने पर केंद्रित थी ताकि यह निर्धारित किया जा सके कि पॉलिश किए गए फर्श पर सूरज की चमक ने गहराई त्रुटि का क्षेत्र उत्पन्न किया या नहीं। यह मामला स्वायत्त प्रणालियों के साथ दुर्घटना विश्लेषण के लिए 3D प्रौद्योगिकियों के अनुप्रयोग में एक मील का पत्थर है, जहां चरम पर्यावरणीय परिस्थितियों के कारण दृश्य धारणा विफल हो गई।
फोरेंसिक वर्कफ़्लो: फोटोग्रामेट्री, LiDAR और Unreal Engine 5 में सिमुलेशन 🛠️
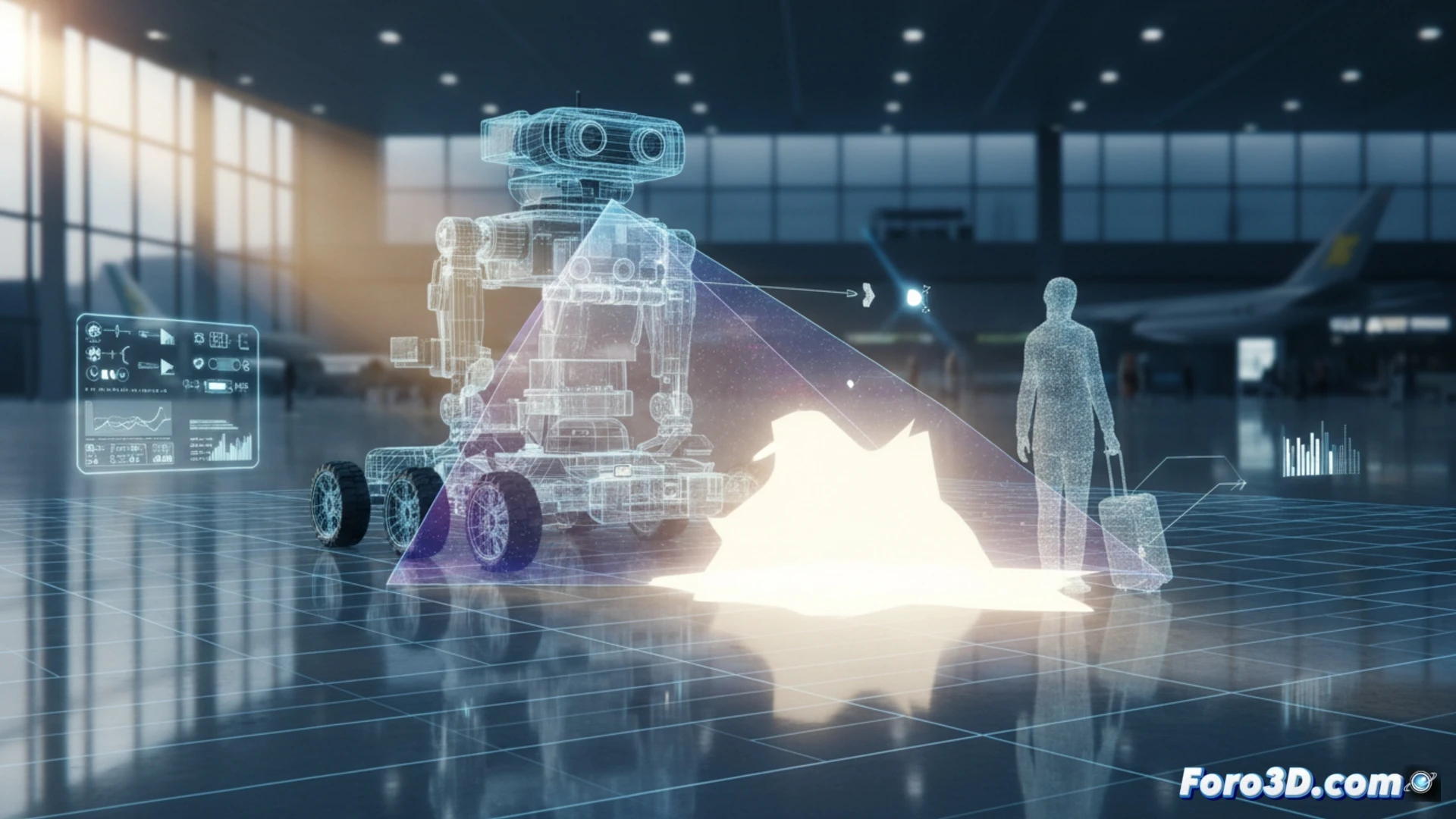
प्रक्रिया RealityCapture के साथ LiDAR स्कैनिंग और फोटोग्रामेट्री के माध्यम से दुर्घटना क्षेत्र के डेटा कैप्चर के साथ शुरू हुई, जिससे फर्श और प्रभाव क्षेत्र का उच्च-घनत्व वाला पॉइंट क्लाउड तैयार हुआ। CloudCompare में, घटना के समय इसके सेंसर की सटीक स्थिति को फिर से बनाने के लिए पर्यावरण डेटा को रोबोट के CAD मॉडल के साथ संरेखित किया गया। फिर, Unreal Engine 5 में, स्टीरियोस्कोपिक दृश्य क्षेत्र का अनुकरण किया गया, जिसमें फर्श पर एक परावर्तक सामग्री लागू की गई और वास्तविक सौर प्रकाश व्यवस्था कॉन्फ़िगर की गई। सिमुलेशन ने पुष्टि की कि प्रतिबिंब ने एक विशिष्ट क्षेत्र में पिक्सेल को संतृप्त करने वाली चमक ढाल उत्पन्न की, द्विनेत्री विषमता को रद्द कर दिया और ठीक उसी स्थान पर 40 सेमी व्यास का एक ऑप्टिकल ब्लाइंड स्पॉट उत्पन्न किया जहां यात्री स्थित था।
स्वायत्त रोबोटिक्स में सेंसर डिज़ाइन के लिए सबक 🤖
यह विशेषज्ञता प्रदर्शित करती है कि स्टीरियोस्कोपिक दृष्टि प्रणालियाँ, हालांकि नियंत्रित परिस्थितियों में मजबूत होती हैं, लेकिन स्पेक्युलर सतहों और अत्यधिक प्रकाश परिवर्तनों के प्रति संवेदनशील होती हैं। लागू की गई पद्धति, जो फोटोग्रामेट्री, पॉइंट क्लाउड संरेखण और सेंसर सिमुलेशन को जोड़ती है, स्वायत्त रोबोट के साथ भविष्य की घटनाओं के लिए एक प्रतिलिपि प्रस्तुत करने योग्य फोरेंसिक पाइपलाइन स्थापित करती है। सौर प्रतिबिंब परिकल्पना का सत्यापन निर्माताओं को हवाई अड्डे के वातावरण में इन ऑप्टिकल ब्लाइंड स्पॉट को कम करने के लिए संवेदी अतिरेक, जैसे टाइम-ऑफ-फ़्लाइट LiDAR, को शामिल करने के लिए बाध्य करता है।
एक फोरेंसिक 3D पुनर्निर्माण हवाई अड्डे पर दुर्घटना के दौरान एक स्वायत्त रोबोट के प्रक्षेपवक्र में प्रक्षेपित छाया द्वारा दृश्य अवरोध के प्रभाव की पहचान कैसे कर सकता है?
(पी.एस.: फोरेंसिक पाइपलाइन में, सबसे महत्वपूर्ण बात यह है कि सबूतों को संदर्भ मॉडल के साथ न मिलाएं... अन्यथा आप दृश्य में एक भूत के साथ समाप्त हो जाएंगे।)