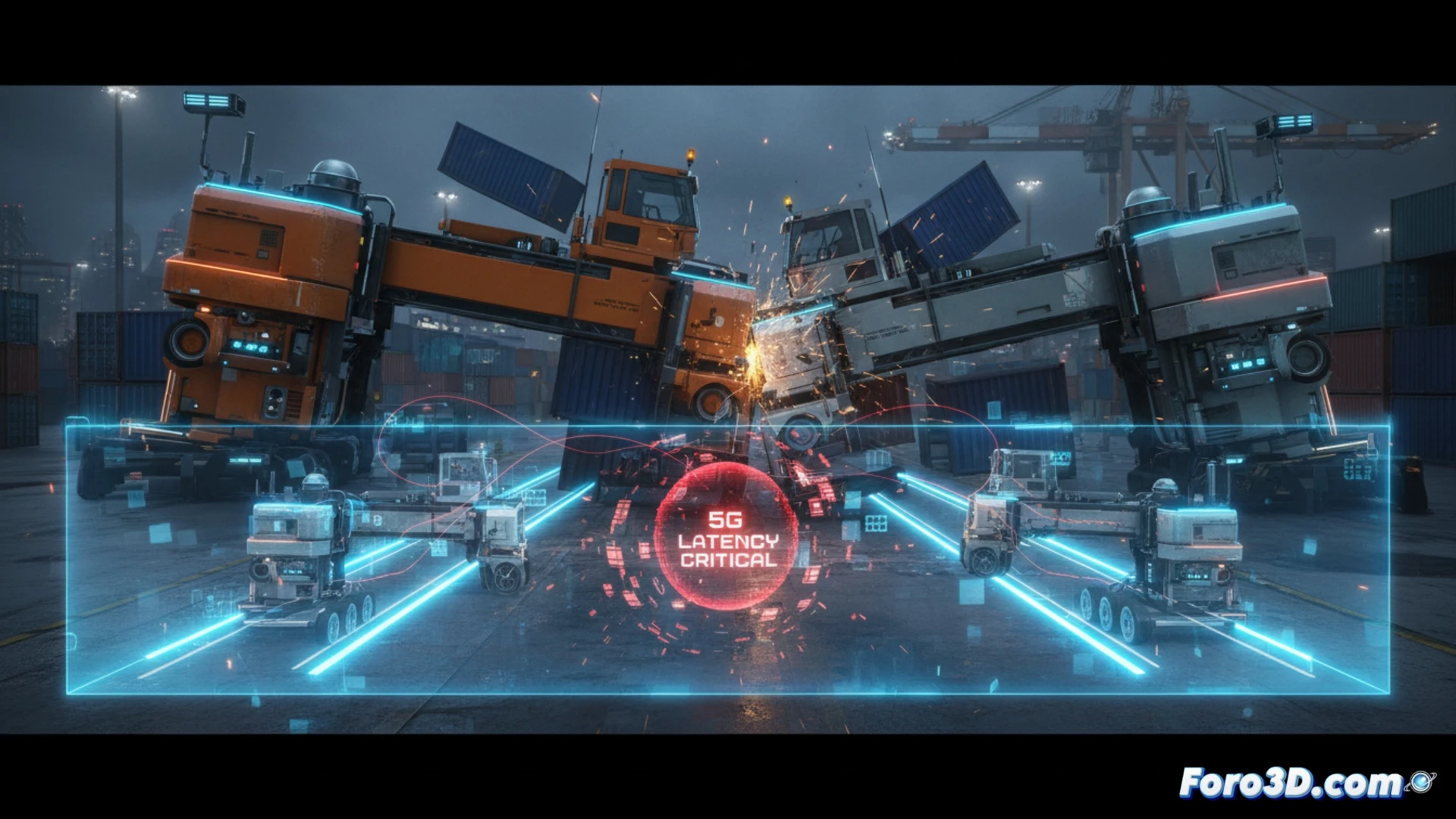
दो स्ट्रैडल कैरियर एक स्वायत्त बंदरगाह टर्मिनल पर टकरा गए, एक ऐसी घटना जो यांत्रिक विफलता लग रही थी जब तक कि फ्यूज्ड सेंसर लॉग (LiDAR और Radar) के 3D पुनर्निर्माण ने एक अधिक सूक्ष्म कारण की ओर इशारा नहीं किया। Gazebo और Unreal Engine 5 में सिमुलेशन ने इंजीनियरों को प्रभाव के सटीक क्षण को फिर से बनाने की अनुमति दी, जिससे पता चला कि युद्धाभ्यास क्षेत्र के डिजिटल ट्विन ने मशीनों में से एक की गलत स्थिति दिखाई। यह विसंगति 5G नेटवर्क में एक महत्वपूर्ण विलंबता के कारण उत्पन्न हुई जिसने रीयल-टाइम डेटा को डीसिंक्रोनाइज़ कर दिया।
Gazebo और Unreal Engine 5 के साथ फोरेंसिक पुनर्निर्माण 🛠️
जांच प्रक्रिया प्रत्येक गैन्ट्री कैरियर पर लगे LiDAR और Radar सिस्टम से कच्चे डेटा निकालने के साथ शुरू हुई। इस डेटा को पहले काइनेमेटिक सिमुलेशन के लिए Gazebo में आयात किया गया, जहां यह देखा गया कि रिकॉर्ड किए गए प्रक्षेपवक्र मार्ग योजना से मेल नहीं खाते। बाद में, फ्यूज्ड पॉइंट क्लाउड को Unreal Engine 5 में डाला गया, जिसमें उच्च बिंदु घनत्व को प्रबंधित करने के लिए Leica Cyclone प्लगइन का उपयोग किया गया। डिजिटल ट्विन में विज़ुअलाइज़ेशन ने दिखाया कि टक्कर के समय वाहनों में से एक अपनी वास्तविक स्थिति से भिन्न आभासी स्थान पर दिखाई दिया। माइक्रोसेकंड में मापी गई 5G नेटवर्क विलंबता के कारण नियंत्रण प्रणाली को एक पुरानी स्थिति अपडेट प्राप्त हुई, जिससे एक गलत गति आदेश उत्पन्न हुआ।
स्वायत्त सुरक्षा की आधारशिला के रूप में डेटा सिंक्रोनाइज़ेशन ⏱️
यह घटना रेखांकित करती है कि डिजिटल ट्विन की विश्वसनीयता केवल 3D मॉडल की सटीकता पर निर्भर नहीं करती, बल्कि डेटा स्ट्रीम के अस्थायी सिंक्रोनाइज़ेशन पर निर्भर करती है। LiDAR और Radar सेंसर का फ्यूजन विसंगति का पता लगाने के लिए महत्वपूर्ण साबित हुआ, लेकिन 5G नेटवर्क ने एक बाधा के रूप में काम किया। भविष्य की टक्करों से बचने के लिए, प्रत्येक सेंसर में हार्डवेयर स्तर पर टाइमस्टैम्पिंग सिस्टम और डिजिटल ट्विन में विलंबता मुआवजा बफर लागू करने का प्रस्ताव है। सबक स्पष्ट है: स्वायत्त लॉजिस्टिक्स में, सिमुलेशन की गति भौतिक दुनिया की गति के बराबर होनी चाहिए।
जैसा कि स्वायत्त बंदरगाह टर्मिनल पर घटना प्रदर्शित करती है, जहां 5G विलंबता के कारण एक पूर्वानुमानित डिजिटल ट्विन के बावजूद दो स्ट्रैडल कैरियर टकरा गए, आप किस मिलीसेकंड में अधिकतम विलंबता सीमा को महत्वपूर्ण मानते हैं ताकि 3D लॉजिस्टिक्स में एक औद्योगिक डिजिटल ट्विन रीयल-टाइम में गैन्ट्री के बीच टक्करों से बच सके, और इस पैरामीटर को मापने और कम करने के लिए आप क्या समाधान प्रस्तावित करते हैं?
(पी.एस.: एक औद्योगिक संयंत्र का अनुकरण करना सिम्स खेलने जैसा है, लेकिन सीढ़ी हटाने के लिए पूल के बिना)