पिछले महीने, एक उच्च-घनत्व वाले स्वचालित गोदाम में 200 से अधिक रोबोट डोमिनो प्रभाव में फंस जाने के कारण उत्पादन पूरी तरह से ठप हो गया। स्पष्ट कारण एल्युमिनियम ग्रिड में बड़े पैमाने पर जाम लगना था। यह निर्धारित करने के लिए कि क्या मात्र 2 मिलीमीटर के लेवलिंग दोष ने यह पतन किया, औद्योगिक विशेषज्ञता टीम ने तीन प्रमुख उपकरणों का सहारा लिया: पॉइंट क्लाउड कैप्चर के लिए Leica Cyclone, इंटरफेरेंस डिटेक्शन के लिए Navisworks और रोबोट ट्रैफिक सिमुलेशन के लिए MassMotion।
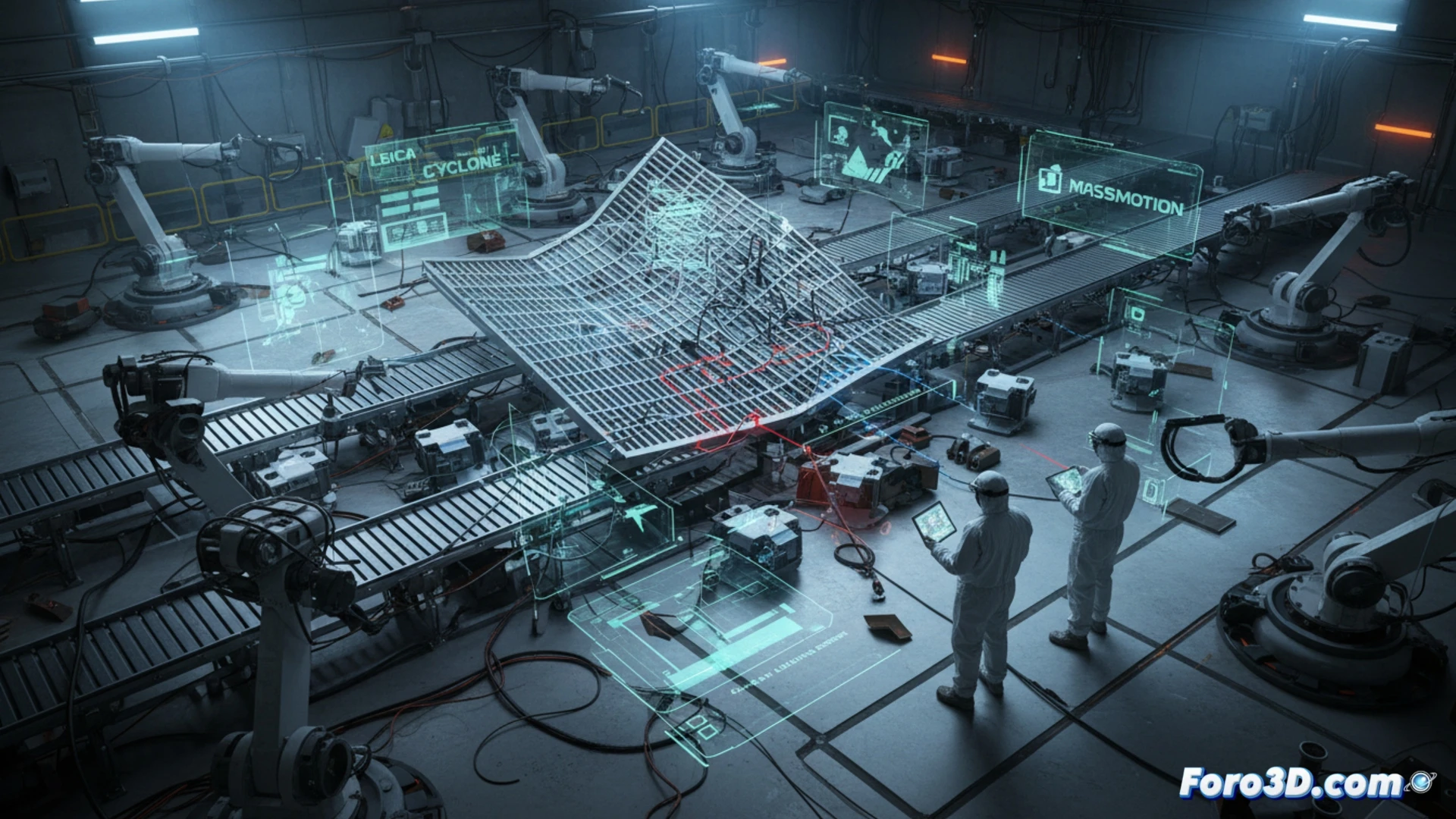
Cyclone और Navisworks के साथ ग्रिड विरूपण का फोरेंसिक विश्लेषण 🔍
विशेषज्ञता का पहला कदम Leica लेजर स्कैनर से पूरी धातु संरचना को स्कैन करना था। परिणामी पॉइंट क्लाउड को Autodesk Navisworks में आयात किया गया, जहां इसे मूल CAD मॉडल पर अध्यारोपित किया गया। विसंगति ने लोडिंग क्षेत्र में एक प्रगतिशील धंसाव का खुलासा किया, जहां ग्रिड क्षैतिज तल से 3.2 मिमी का विचलन दर्शा रहा था। यह त्रुटि, हालांकि मिलीमीटर में थी, रोबोट के पहियों (जो 1 मिमी की सहनशीलता के साथ डिज़ाइन किए गए थे) के लिए कर्षण खोने के लिए पर्याप्त थी। Navisworks में क्लैश डिटेक्शन विश्लेषण ने पुष्टि की कि पटरियों के असममित घिसाव के कारण रोबोट अपने पथ से भटक गए, पार्श्व रूप से टकराए और श्रृंखलाबद्ध जाम उत्पन्न किया।
MassMotion के साथ पूर्वानुमानित सिमुलेशन: गोदाम डिजाइन के लिए सबक 🤖
विशेषज्ञता ने केवल कारण ही नहीं, बल्कि रोकथाम की भी तलाश की। MassMotion का उपयोग करके, इंजीनियरों ने विकृत ग्रिड की स्थिति में रोबोट प्रवाह को फिर से बनाया। सिमुलेशन ने प्रदर्शित किया कि 0.1 डिग्री के ढलान पर भी, ग्रिड-आधारित नेविगेशन सिस्टम आपातकालीन मार्गों की गणना करने में विफल रहा। तकनीकी सबक स्पष्ट है: AutoStore-शैली के गोदामों में, फर्श की समतलता की 3D सेंसर के माध्यम से वास्तविक समय में निगरानी की जानी चाहिए। मानव आंखों के लिए अदृश्य कोई भी मिलीमीटर विचलन, एक लॉजिस्टिक पतन को ट्रिगर कर सकता है जो आपूर्ति श्रृंखला को घंटों के लिए रोक सकता है।
एल्युमिनियम ग्रिड के विरूपण की जांच करने और यह निर्धारित करने के लिए कि क्या पतन सामग्री की थकान या रोबोट के गतिशील भार डिजाइन में त्रुटि के कारण हुआ, आप 3D स्कैनिंग और संरचनात्मक विश्लेषण की कौन सी पद्धति लागू करेंगे?
(नोट: 3D में बाधाएं ट्रैफिक जाम की तरह हैं: आप उन्हें आते देखते हैं लेकिन टाल नहीं सकते)