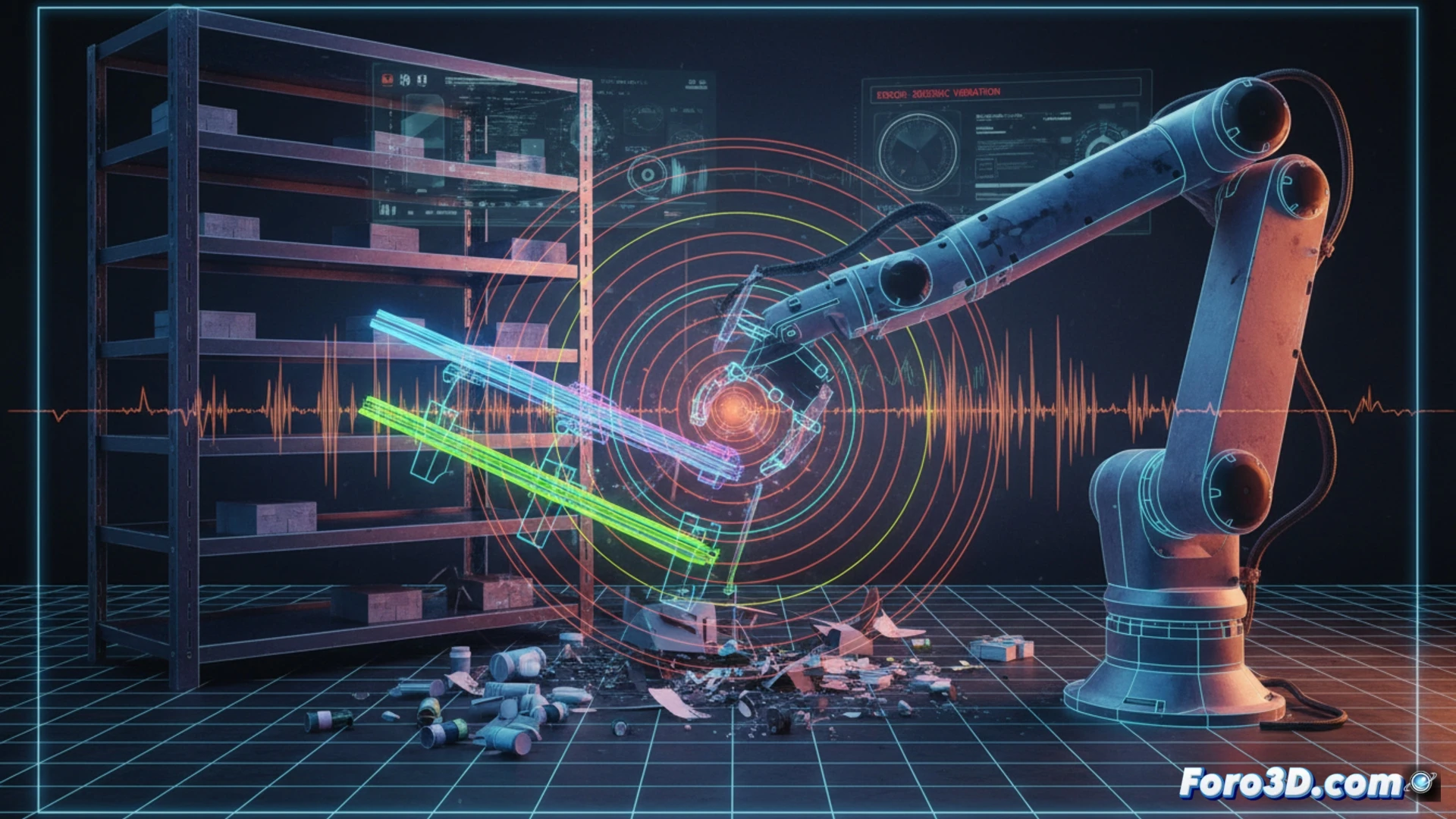
यह घटना एक उच्च गति वाली रोबोटिक फार्मेसी में घटी: रोबोटिक आर्म ने वर्टिकल स्टोरेज सिस्टम की अलमारियों से जोरदार टक्कर मारी। पहली नज़र में, यह प्रोग्रामिंग की गलती लग रही थी, लेकिन रखरखाव टीम को एक बाहरी कारक का संदेह हुआ। 3D विश्लेषण से गाइड रेल में मिलीमीटर स्तर की विकृतियाँ सामने आईं, जो इमारत के मानक सेंसरों द्वारा रिकॉर्ड न किए गए भूकंपीय कंपनों के कारण हुई थीं।
RoboGuide, RealWorks और CloudCompare के साथ निरीक्षण पद्धति 🤖
निदान RoboGuide में शुरू हुआ, जहां बांह के मूल प्रक्षेप पथ का अनुकरण किया गया। PLC से टेलीमेट्री डेटा के साथ इसकी तुलना करने पर, Z-अक्ष में 2.3 मिमी का विचलन पाया गया। कारण की पुष्टि करने के लिए, Trimble लेज़र स्कैनर से रेलों को स्कैन किया गया और पॉइंट क्लाउड को Trimble RealWorks में संसाधित किया गया। सतहों के संरेखण से बाईं रेल में एक उभार दिखाई दिया। CloudCompare का उपयोग करके, वर्तमान स्थिति और मूल CAD डिज़ाइन के बीच दूरी की तुलना (M3C2) की गई, जिससे प्रभाव क्षेत्र में 1.8 मिमी तक की विकृतियों की गणना हुई। Blender का उपयोग एक फोरेंसिक एनिमेशन बनाने के लिए किया गया, जो भूकंपीय कंपन के क्षण को अंतिम प्रभावक के प्रक्षेप पथ से संबंधित करता है।
स्वचालित प्रणालियों के अंशांकन के लिए सबक ⚙️
यह मामला दर्शाता है कि फार्मेसी में रोबोटिक प्रणालियों को रोबोट के आंतरिक सेंसरों से परे संरचनात्मक निगरानी की आवश्यकता होती है। कम आयाम वाले भूकंपीय कंपन, भले ही इमारत को नुकसान न पहुँचाएँ, सटीक रेलों को असंतुलित कर सकते हैं। अलमारियों के आधार पर एक्सेलेरोमीटर को एकीकृत करने और टक्कर उत्पन्न होने से पहले उप-मिलीमीटर विकृतियों का पता लगाने के लिए CloudCompare के साथ समय-समय पर 3D स्कैन करने की सिफारिश की जाती है। सुधार में रेलों के एंकरों को पुनः समायोजित करना और RoboGuide में एक नए त्रुटि मुआवजा मानचित्र के साथ बांह को पुन: कैलिब्रेट करना शामिल था।
फार्मेसी रोबोटिक वातावरण में शुरू में मॉडल नहीं किए गए भूकंपीय कंपनों का सामना करने पर फार्मास्युटिकल रोबोटिक आर्म के प्रक्षेप पथ की भविष्यवाणी करने के लिए टक्कर का 3D विश्लेषण मॉडल कितना विश्वसनीय है
(नोट: रोबोट का अनुकरण करना मजेदार है, जब तक वे आपके आदेशों का पालन न करने का निर्णय न लें।)