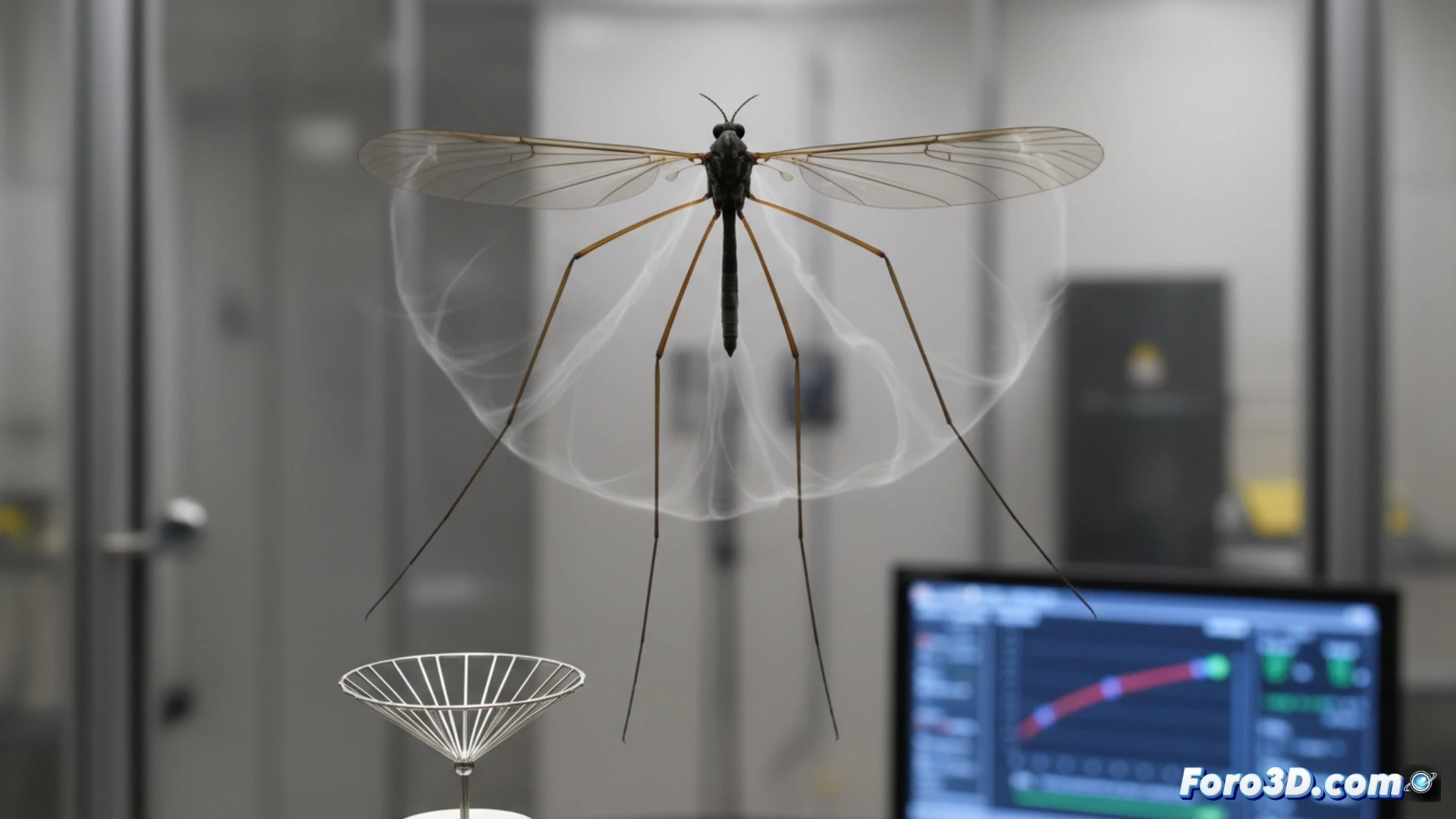
एक हालिया अध्ययन ने मॉडलिंग और 3D प्रिंटिंग का उपयोग करके भूत मक्खी (Bittacomorpha clavipes) की असामान्य उड़ान रणनीति को समझा। यह शोध, जो वैज्ञानिक दृश्यीकरण पर केंद्रित है, प्रकट करता है कि यह कीट चढ़ने के लिए पंख फड़फड़ाता नहीं है। इसके बजाय, यह अपनी लंबी टांगें फैलाकर एक शंक्वाकार संरचना बनाता है जो पैराशूट की तरह कार्य करती है, ऊपर की ओर हवा की धाराओं का लाभ उठाती है। इस तंत्र को समझने की कुंजी भौतिक और डिजिटल प्रक्रिया की पुनरावृत्ति रही है।
निरीक्षण से सिमुलेशन तक: एक एकीकृत 3D कार्यप्रवाह 🛠️
शोध प्रक्रिया वैज्ञानिक दृश्यीकरण पाइपलाइन का एकदम सही उदाहरण है। जैविक निरीक्षण के बाद, मक्खी के सटीक डिजिटल 3D मॉडल बनाए गए। इनका उपयोग स्केल पर भौतिक मॉडल बनाने के लिए 3D प्रिंटिंग द्वारा किया गया, जो विंड टनल प्रयोगों में उपयोग किए गए। साथ ही, डिजिटल मॉडल ने कम्प्यूटेशनल फ्लूइड डायनामिक्स (CFD) सिमुलेशनों को चलाने की अनुमति दी ताकि पैरों की संरचना के आसपास हवा के प्रवाह को दृश्यीकृत और मापा जा सके। भौतिक और सिमुलेटेड डेटा के बीच सहसंबंध ने खोज को मान्य किया: पैरों का उल्टा शंकु समायोज्य एरोडायनामिक प्रतिरोध उत्पन्न करता है जो मुफ्त उछाल प्रदान करता है।
दृश्यीकृत बायोइंस्पिरेशन: कुशल माइक्रोरॉबोट्स की ओर 🤖
इस घटना का दृश्यीकरण न केवल एक प्राकृतिक रहस्य को समझाता है, बल्कि इंजीनियरिंग के लिए एक मार्ग भी रेखांकित करता है। सूक्ष्म स्तर पर ज्यामिति और हवा की चिपचिपाहट के कैसे इंटरैक्ट करते हैं, इसे समझने और ग्राफिक रूप से देखने से कम ऊर्जा वाले लघु हवाई वाहनों का डिजाइन संभव हो सकता है। शोध पहले से ही आकार स्मृति मिश्र धातुओं के उपयोग की खोज कर रहा है ताकि पैरों की निष्क्रिय गति को दोहराया जा सके, जो सीधे तीन आयामों में जटिल डेटा को मॉडलिंग और दृश्यीकृत करने की क्षमता से जन्मा एक डिजाइन सिद्धांत है।
3D दृश्यीकरण और स्केल मॉडलों की प्रिंटिंग ने भूत मक्खी के स्थिर उड़ान के पीछे जटिल एरोडायनामिक तंत्रों को कैसे प्रकट किया? 🧐
(PD: महासागर का सिमुलेट करने के लिए द्रव भौतिकी समुद्र जैसी है: अप्रत्याशित और हमेशा RAM खत्म हो जाती है)