रोबोटिक शेल्फिंग सिस्टम में हाल ही में हुई विफलता ने लॉजिस्टिक्स और औद्योगिक उत्पादन इंजीनियरों को सतर्क कर दिया है। यह घटना, जहां एक स्वचालित संरचना संचालन के दौरान ढह गई, ने न केवल आपूर्ति श्रृंखला को रोक दिया, बल्कि यांत्रिक डिजाइन में छिपी कमजोरियों को भी उजागर किया। मूल कारणों को समझने के लिए, हम 3D सिमुलेशन और डिजिटल ट्विन्स का सहारा लेते हैं, ऐसे उपकरण जो घटना को मिलीमीटर दर मिलीमीटर फिर से बनाने और प्रत्येक घटक में तनाव वितरण की कल्पना करने की अनुमति देते हैं।
पतन का मॉडलिंग और संरचनात्मक तनाव विश्लेषण 🏗️
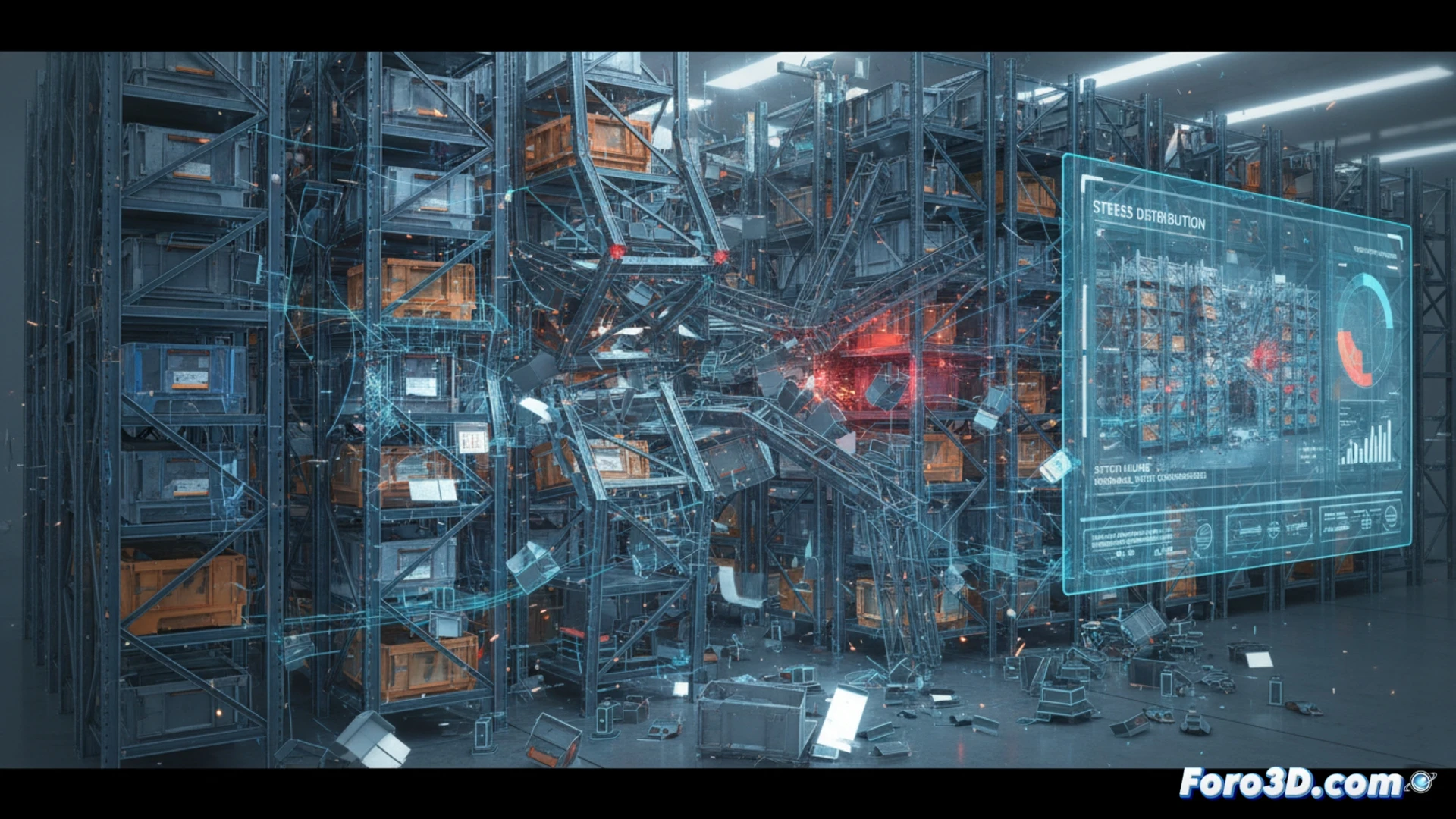
परिमित तत्व सॉफ्टवेयर (FEA) और पैरामीट्रिक मॉडलिंग के माध्यम से, हमने रोबोटिक शेल्फिंग की सटीक ज्यामिति का पुनर्निर्माण किया, जिसमें रेल, सपोर्ट और एंकर पॉइंट शामिल हैं। गतिशील सिमुलेशन ने पतन के अनुक्रम को पुन: प्रस्तुत किया: पहले, आधार के जोड़ों में एक प्रगतिशील विरूपण; फिर, केंद्रीय लॉन्गरॉन में एक भंगुर फ्रैक्चर। हीट मैप्स ने खुलासा किया कि अधिकतम तनाव स्टील की लोचदार सीमा से 40% अधिक था, जो गाइड रेल और ऊर्ध्वाधर प्रोफाइल के बीच कनेक्शन बिंदु पर स्थित था। इससे पता चलता है कि बार-बार लोड चक्रों से बढ़ी हुई सामग्री की थकान, मुख्य ट्रिगर थी।
डिजिटल ट्विन्स के साथ पूर्वानुमानित रखरखाव के लिए सबक 🔧
यह मामला दर्शाता है कि 3D सिमुलेशन न केवल डिजाइन करने के लिए, बल्कि विफलताओं के होने से पहले उनकी भविष्यवाणी करने के लिए भी काम करता है। IoT सेंसर डेटा को डिजिटल ट्विन में एकीकृत करके, हम प्रत्येक शेल्फ के विरूपण की वास्तविक समय में निगरानी कर सकते हैं और लोड चक्रों को समायोजित कर सकते हैं। तकनीकी प्रस्ताव स्पष्ट है: आभासी मॉडल में समय-समय पर थकान सिमुलेशन लागू करना, गणना के घंटों में 10 साल के संचालन का अनुकरण करना। इस प्रकार, महत्वपूर्ण बिंदुओं की पहचान की जाती है और सक्रिय रखरखाव निर्धारित किया जाता है, जिससे पतन से बचा जा सके और रोबोटिक सिस्टम के जीवनकाल को अनुकूलित किया जा सके।
औद्योगिक रोबोटिक शेल्फिंग में पतन की सटीक भविष्यवाणी करने के लिए 3D सिमुलेशन में कौन से महत्वपूर्ण लोड और संरचनात्मक थकान पैरामीटर शामिल किए जाने चाहिए?
(पी.एस.: Foro3D में हम रूट्स को उसी तरह ऑप्टिमाइज़ करते हैं जैसे हम पॉलीगॉन को ऑप्टिमाइज़ करते हैं: जब तक कंप्यूटर बस बहुत हो गया न कहे)