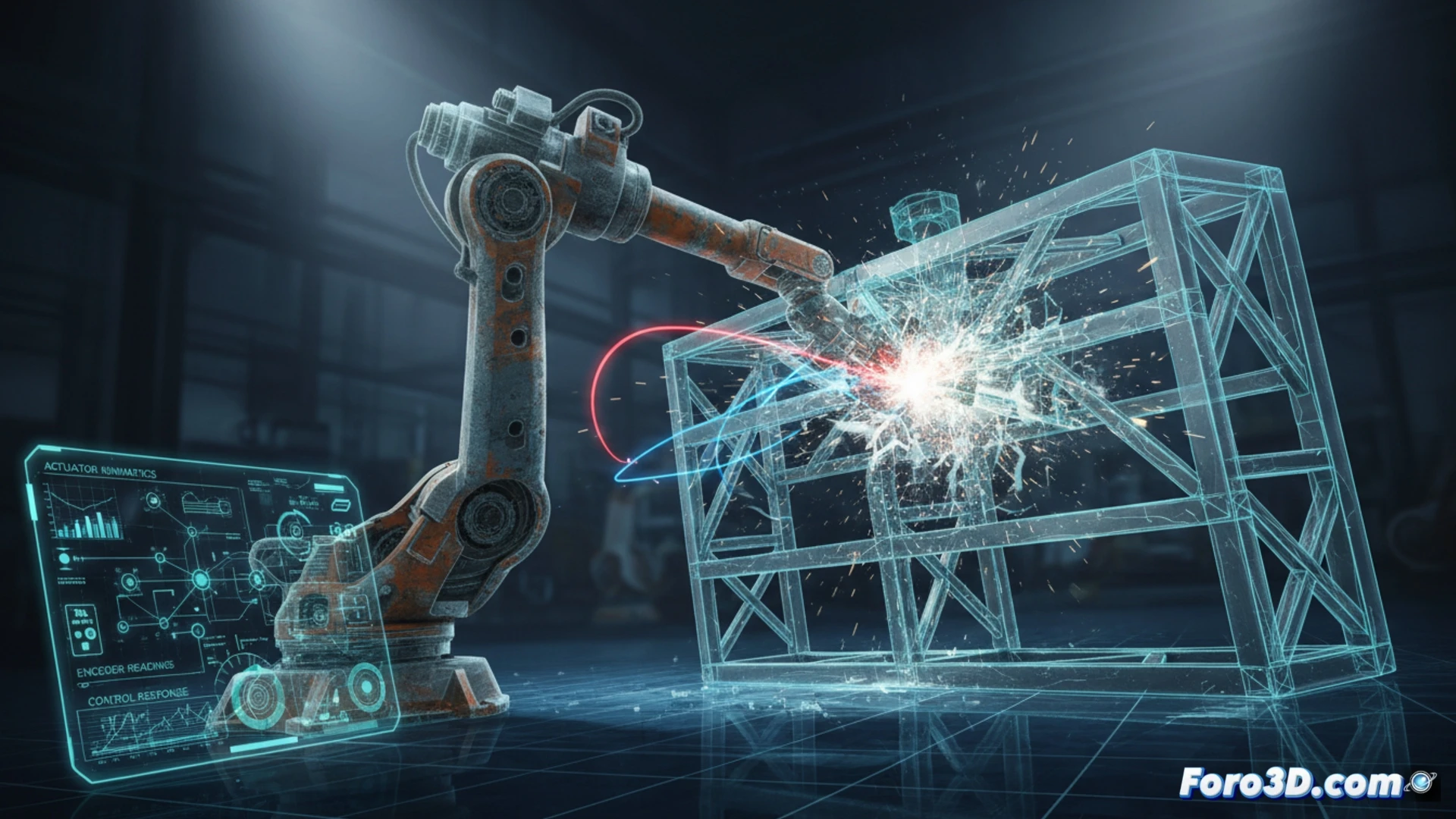
जिस घटना को पेंटर रोबोट त्रुटि के नाम से जाना जाता है, उसने औद्योगिक सुरक्षा के क्षेत्र में एक तकनीकी बहस छेड़ दी है। एक रोबोटिक आर्म, जिसे ऑटोमोटिव पार्ट्स पर कोटिंग लगाने के लिए प्रोग्राम किया गया था, ने अचानक अपना प्रक्षेप पथ बदल दिया और एक धातु संरचना से टकरा गया। यह मामला फोरेंसिक पाइपलाइन के लिए एक आदर्श अध्ययन वस्तु बन जाता है, जहां दृश्य का 3D पुनर्निर्माण एक्चुएटर की गतिकी, एनकोडर रीडिंग और नियंत्रण प्रणाली की प्रतिक्रिया जैसे चरों को अलग करने की अनुमति देता है।
प्रक्षेप पथ सिमुलेशन और यांत्रिक विफलता विश्लेषण 🔧
जांच को संबोधित करने के लिए, LiDAR स्कैनर से कैप्चर किए गए पॉइंट क्लाउड का उपयोग करके पर्यावरण का एक डिजिटल मॉडल तैयार किया जाता है। प्रभाव से पहले के गति लॉग पर आधारित रोबोटिक आर्म का गतिशील सिमुलेशन, कलाई के रोटेशन अक्ष में एक विसंगति प्रकट करता है। 3D फोरेंसिक विश्लेषण उस सटीक क्षण को अलग करने की अनुमति देता है जब कोणीय वेग सुरक्षा सीमा से अधिक हो गया था, जो हार्मोनिक रिड्यूसर में विफलता या रिज़ॉल्वर सिग्नल में भ्रष्टाचार का सुझाव देता है। यह दृष्टिकोण मानवीय त्रुटियों को खारिज करता है और कारण को यांत्रिक घटक के समय से पहले घिसाव पर केंद्रित करता है।
स्वचालित वातावरण में रोकथाम के लिए सबक 🛡️
फोरेंसिक एनीमेशन के माध्यम से दुर्घटना का विज़ुअलाइज़ेशन न केवल ब्रेकपॉइंट की पहचान करता है, बल्कि पूर्वानुमानित रखरखाव के लिए एक समीक्षा प्रोटोकॉल स्थापित करता है। कंपन सेंसर का एकीकरण और व्युत्क्रम गतिकी की वास्तविक समय निगरानी समान विचलन का पूर्वानुमान लगा सकती है। यह मामला दर्शाता है कि घटनाओं का 3D दस्तावेज़ीकरण सुरक्षा इंजीनियरिंग के लिए एक अपरिहार्य उपकरण है, जो एक पृथक त्रुटि को पूरे रोबोटिक उद्योग के लिए एक दोहराए जाने योग्य सबक में बदल देता है।
कौन सी फोरेंसिक पाइपलाइन पद्धति औद्योगिक पेंटर रोबोट त्रुटि के 3D पुनर्निर्माण में प्रक्षेप पथ योजना में एक एल्गोरिथम विफलता और एक अमॉडल्ड भौतिक विचलन के बीच अंतर करने की अनुमति देती है?
(नोट: फोरेंसिक पाइपलाइन में, सबसे महत्वपूर्ण बात यह है कि सबूतों को संदर्भ मॉडल के साथ न मिलाएं... अन्यथा आप दृश्य में एक भूत के साथ समाप्त हो जाएंगे।)