फोरेंसिक पाइपलाइन के क्षेत्र में, घरेलू घटनाओं के दस्तावेज़ीकरण के लिए शामिल भौतिक चरों का सटीक विश्लेषण आवश्यक है। पालने से मॉनिटर के गिरने का मामला एक तकनीकी चुनौती प्रस्तुत करता है: यह निर्धारित करना कि क्या इसका कारण सपोर्ट की यांत्रिक विफलता, गलत स्थापना या कोई बाहरी बल था। यहाँ हम तथ्यों को स्पष्ट करने के लिए मॉडलिंग और सिमुलेशन प्रक्रिया का विवरण देते हैं।
पैरामीट्रिक मॉडलिंग और लोड सिमुलेशन 🛠️
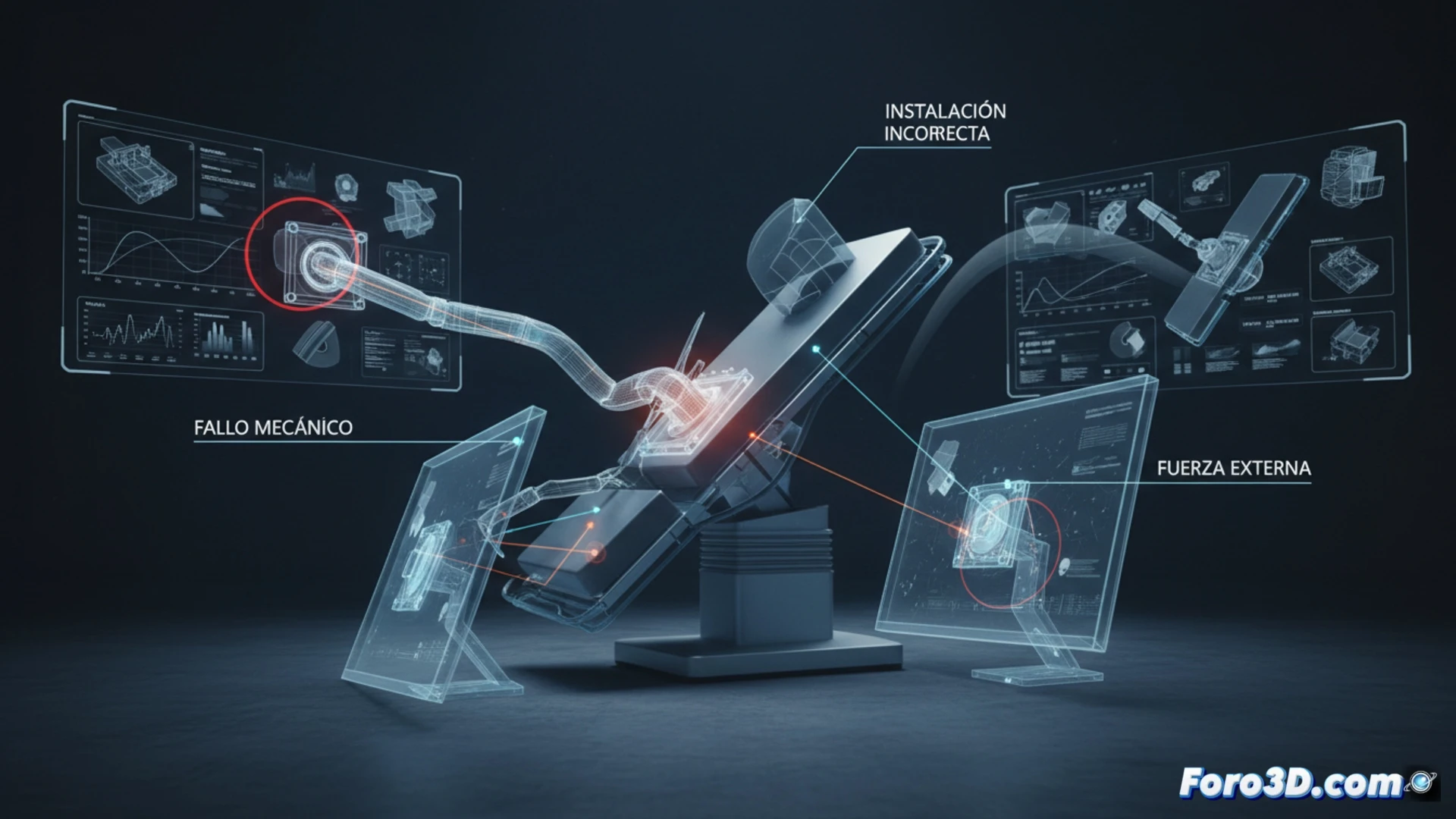
हम Blender में पालने और मॉनिटर की 3D मॉडलिंग से शुरुआत करते हैं, भौतिकी गणना को अनुकूलित करने के लिए कम पॉलीगॉन मेश का उपयोग करते हुए। बन्धन प्रणाली को टॉर्क जोड़ों और एंकर बिंदुओं के साथ पैरामीट्रिज़ किया गया। बाद में, सिमुलेशन इंजन में, हमने गिरने को फिर से बनाने के लिए बल वैक्टर लागू किए। तीन परिदृश्यों का विश्लेषण किया गया: प्लास्टिक सामग्री की थकान, बच्चे की हरकत से कंपन, और केबल का आकस्मिक खिंचाव। प्रक्रिया के स्क्रीनशॉट सपोर्ट के विरूपण और प्रभाव तक मॉनिटर के प्रक्षेपवक्र को दर्शाते हैं।
रोकथाम और डिज़ाइन के लिए सबक 🧠
सिमुलेशन ने खुलासा किया कि सबसे संभावित विफलता सामग्री की थकान और ऑफ-सेंटर माउंटिंग का संयोजन था। यह विश्लेषण न केवल विशेषज्ञ साक्ष्य के रूप में कार्य करता है, बल्कि सुरक्षित बन्धन प्रणालियों को फिर से डिज़ाइन करने के लिए ठोस डेटा भी प्रदान करता है। फोरेंसिक पाइपलाइन में, प्रत्येक 3D मॉडल भविष्य की घटनाओं को रोकने, पुनर्निर्माण को रोकथाम में बदलने का एक उपकरण है।
फोरेंसिक पालने के 3D मेशिंग की सटीकता, फोरेंसिक विश्लेषण पाइपलाइन में प्रभाव परिकल्पनाओं को मान्य करने के लिए गिरने के दौरान मॉनिटर की गति और प्रक्षेपवक्र के निर्धारण को कैसे प्रभावित करती है?
(पी.एस.: दृश्य का दस्तावेज़ीकरण करने से पहले लेज़र स्कैनर को कैलिब्रेट करना न भूलें... अन्यथा आप किसी भूत का मॉडल बना सकते हैं)