एक स्वचालित लॉजिस्टिक्स सेंटर में रोबोटिक शेल्फिंग के हालिया ढहने ने उद्योग 4.0 के लिए एक महत्वपूर्ण प्रश्न सामने रखा है: क्या हम संरचनात्मक विफलताओं के होने से पहले उनकी भविष्यवाणी कर सकते हैं? यह घटना, जिसने हफ्तों तक संचालन को ठप कर दिया, केवल एक मैकेनिकल इंजीनियरिंग समस्या नहीं है, बल्कि एक स्पष्ट उदाहरण है कि पारंपरिक निगरानी कहाँ विफल होती है। डिजिटल ट्विन्स के माध्यम से लागू 3D सिमुलेशन, इन आपदाओं से बचने के लिए एक ठोस समाधान प्रदान करता है।
सामग्री थकान और घटक तनाव का विश्लेषण 🛠️
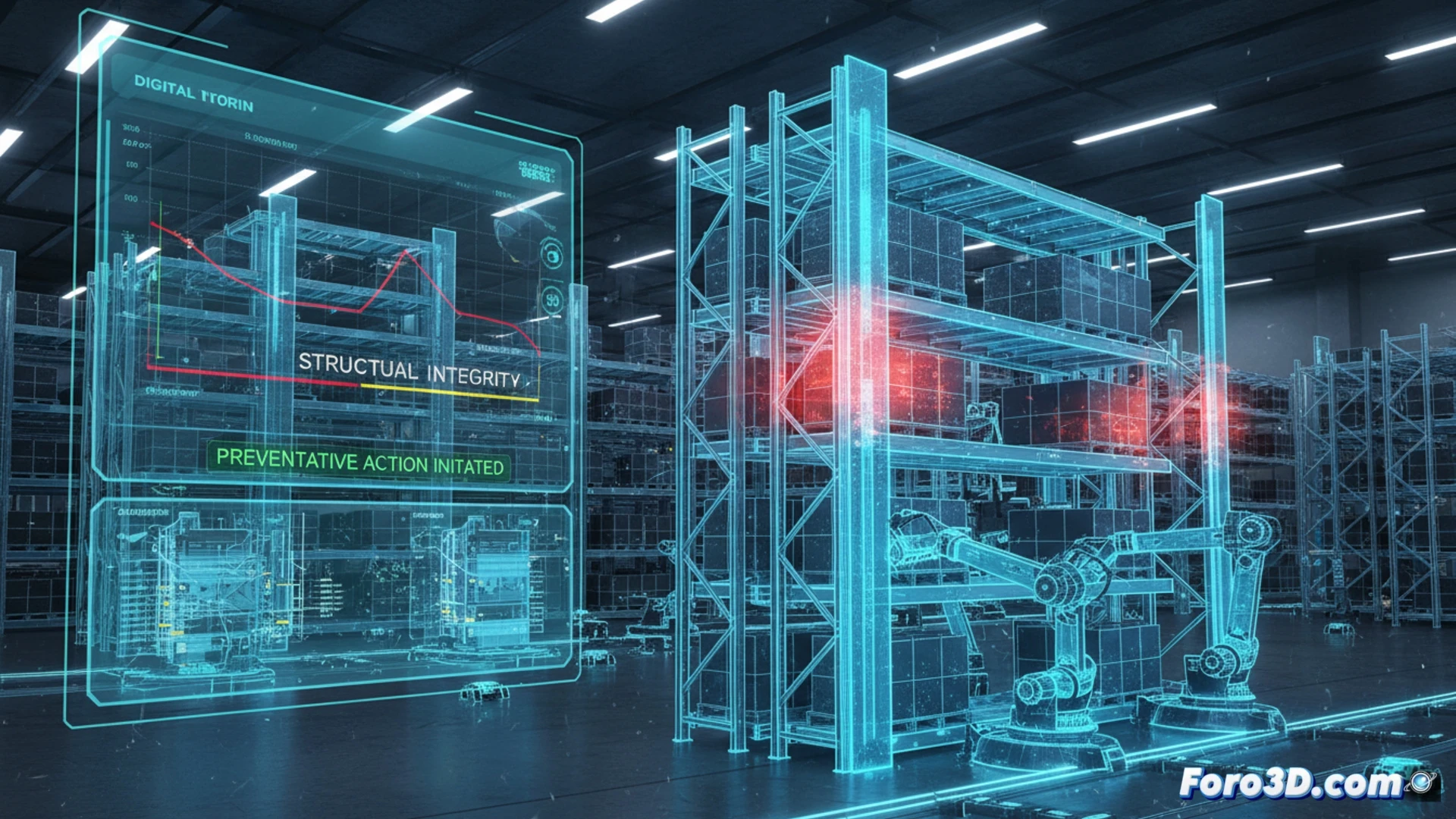
ढहने को रोकने की कुंजी गतिशील भार के सिमुलेशन में निहित है। एक डिजिटल ट्विन न केवल शेल्फिंग की ज्यामिति को दोहराता है, बल्कि IoT सेंसर से वास्तविक समय के डेटा को एकीकृत करता है। लोडिंग और अनलोडिंग के दोहराए जाने वाले चक्रों के तहत सामग्री के व्यवहार को मॉडल करके, सिमुलेशन सॉफ्टवेयर थकान के उन बिंदुओं की पहचान कर सकता है जिन्हें मानव आँख नहीं पकड़ पाएगी। जोड़ नोड्स पर तनाव के हीट मैप का विज़ुअलाइज़ेशन इंजीनियरों को पहली दरारें दिखने से पहले यह देखने की अनुमति देता है कि तनाव वास्तव में कहाँ केंद्रित है। यह पद्धति एक अमूर्त जोखिम को कार्रवाई योग्य दृश्य डेटा में बदल देती है।
स्वचालित वेयरहाउस में जोखिम परिदृश्यों का सिमुलेशन ⚠️
स्थैतिक विश्लेषण से परे, 3D सिमुलेशन जोखिम परिदृश्यों को निष्पादित करने की अनुमति देता है जिन्हें वास्तविकता में परीक्षण करना असंभव है। हम एक रोबोट के अचानक ब्रेक लगाने के प्रभाव, एक कन्वेयर बेल्ट के कंपन, या यहां तक कि कम तीव्रता वाले भूकंप का मॉडल बना सकते हैं। डिजिटल ट्विन को इन घटनाओं के अधीन करके, आसन्न ढहने का एक सटीक पूर्वानुमान प्राप्त होता है। निष्कर्ष स्पष्ट है: डिजाइन और रखरखाव चरण में थकान सिमुलेशन को एकीकृत करना कोई विलासिता नहीं है, बल्कि औद्योगिक लॉजिस्टिक्स में परिचालन सुरक्षा के लिए एक आवश्यकता है।
उच्च घनत्व वाली रोबोटिक शेल्फिंग में संरचनात्मक विफलताओं की भविष्यवाणी और रोकथाम के लिए पारंपरिक निगरानी प्रणालियों की तुलना में डिजिटल ट्विन्स के कार्यान्वयन से क्या परिचालन और सुरक्षा लाभ मिलते हैं?
(पी.एस.: लॉजिस्टिक्स प्रवाह को देखना चींटियों को देखने जैसा है... लेकिन कम व्यवस्था और अधिक बजट के साथ)