हाल ही में एक बड़े टन भार वाले खनन रोबोट के आर्टिकुलेटेड आर्म में निष्कर्षण ऑपरेशन के दौरान भयावह टूटने की घटना ने चरम वातावरण में यांत्रिक विफलताओं पर ध्यान केंद्रित किया है। इस प्रकार की मशीनरी, जो चक्रीय भार और अपघर्षक स्थितियों को सहन करने के लिए डिज़ाइन की गई है, अचानक विफल हो गई, जो सामग्री की थकान के कारण ढहने या नियंत्रण प्रणाली द्वारा पता न लगाए गए ओवरलोड का संकेत देती है। इंजीनियरिंग के दृष्टिकोण से इस घटना का विश्लेषण करने से हमें इन उपकरणों के डिजाइन और निगरानी को अनुकूलित करने का तरीका समझने में मदद मिलती है।
सामग्री थकान, ओवरलोड और विफलता में सॉफ्टवेयर त्रुटियाँ ⚙️
इस टूटने के तकनीकी कारणों को तीन मुख्य मोर्चों में विभाजित किया जा सकता है। पहला, सामग्री थकान: खनन रोबोट लगातार कंपन और झटकों के तहत काम करता है, जो स्टील या एल्युमीनियम मिश्र धातुओं में माइक्रोक्रैक उत्पन्न करता है, जो समय के साथ भंगुर फ्रैक्चर में बदल जाते हैं। दूसरा, परिचालन ओवरलोड: यदि सेंसर सिस्टम ने निकाली गई सामग्री के वजन को सही ढंग से कैलिब्रेट नहीं किया या रोबोट ने एक मजबूर मोड़ में अपने अधिकतम टॉर्क को पार कर लिया, तो एक्चुएटर्स और जोड़ों पर तनाव लोचदार सीमा से अधिक हो गया। तीसरा, प्रक्षेपवक्र नियंत्रण में एक संभावित सॉफ्टवेयर त्रुटि, जहां एक दोषपूर्ण फीडबैक लूप ने जड़ता की भरपाई किए बिना अचानक गति का आदेश दिया, जिससे संरचना के महत्वपूर्ण बिंदु पर तनाव का एक शिखर उत्पन्न हुआ।
3D सिमुलेशन और डिजिटल ट्विन इन विफलताओं को कैसे रोकते हैं 🛠️
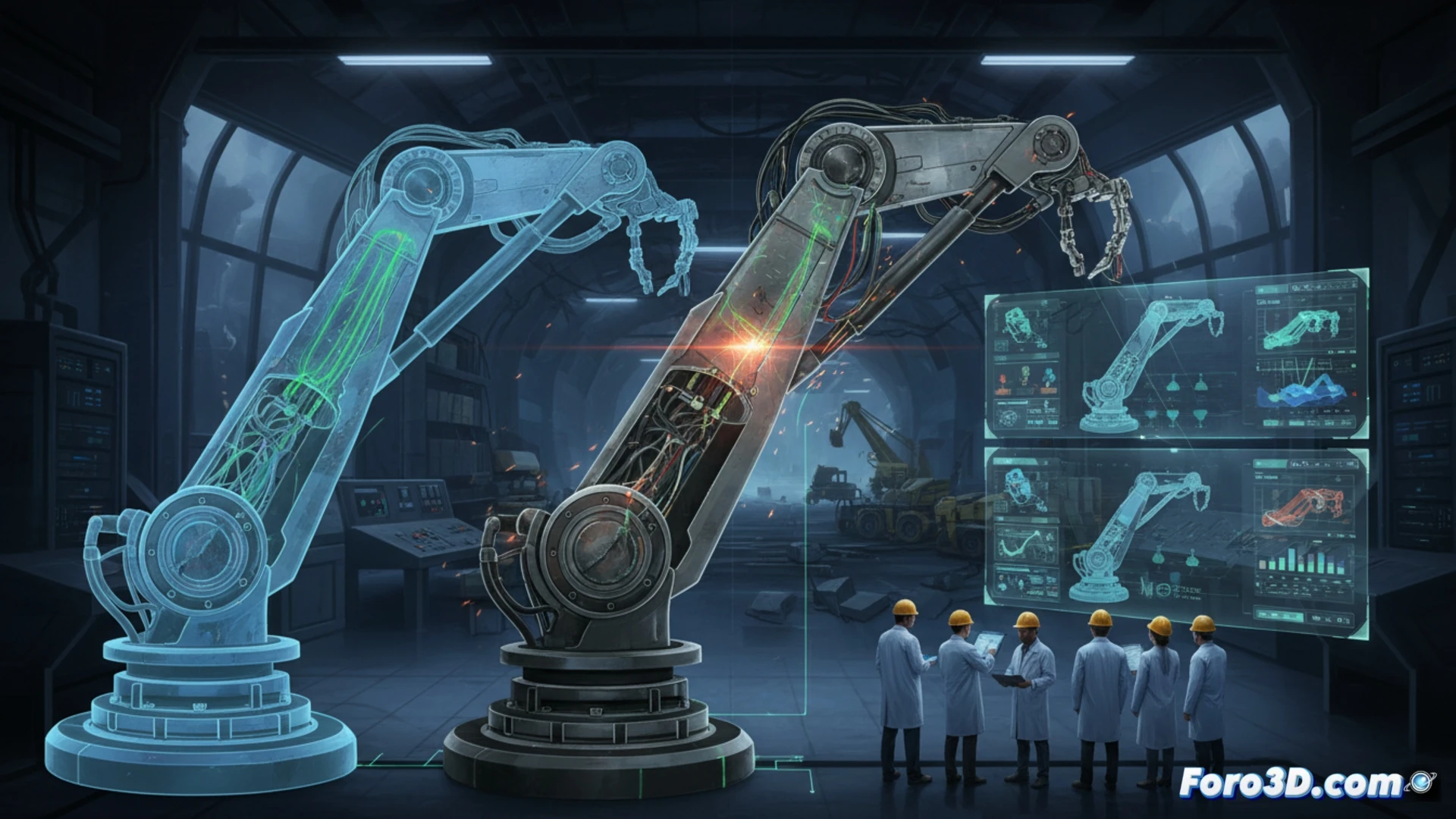
डिजिटल ट्विन के माध्यम से सिमुलेशन इस टूटने की भविष्यवाणी और रोकथाम के लिए महत्वपूर्ण उपकरण है। तनाव-विकृति डेटा के साथ रोबोट को 3D में मॉडलिंग करके, हीट मैप देखे जा सकते हैं जो उन महत्वपूर्ण बिंदुओं को इंगित करते हैं जहां थकान जमा होती है, जैसे बॉल जॉइंट या आर्म के वेल्ड। एक डिजिटल ट्विन वास्तविक उपकरण को खराब किए बिना हजारों आभासी लोड चक्र चलाने की अनुमति देता है, जो होने से पहले ओवरलोड की पहचान करता है। इसके अलावा, यह असामान्य कंपन के बारे में सचेत करने के लिए IoT सेंसर डेटा को एकीकृत करता है, माइक्रोक्रैक के पहले संकेत पर मशीन को रोकता है, जिससे स्वचालित खनन में भयावह टूटने से बचा जा सकता है।
एक डिजिटल ट्विन कैसे भयावह टूटने से पहले खनन रोबोट के आर्टिकुलेटेड आर्म में थकान विफलता मोड की सटीक भविष्यवाणी और रोकथाम कर सकता है, जिसमें गतिशील भार और भूमिगत वातावरण के घर्षण जैसे चर शामिल हैं?
(पी.एस.: रोबोट का सिमुलेशन करना मजेदार है, जब तक वे आपके आदेशों का पालन न करने का फैसला न करें।)