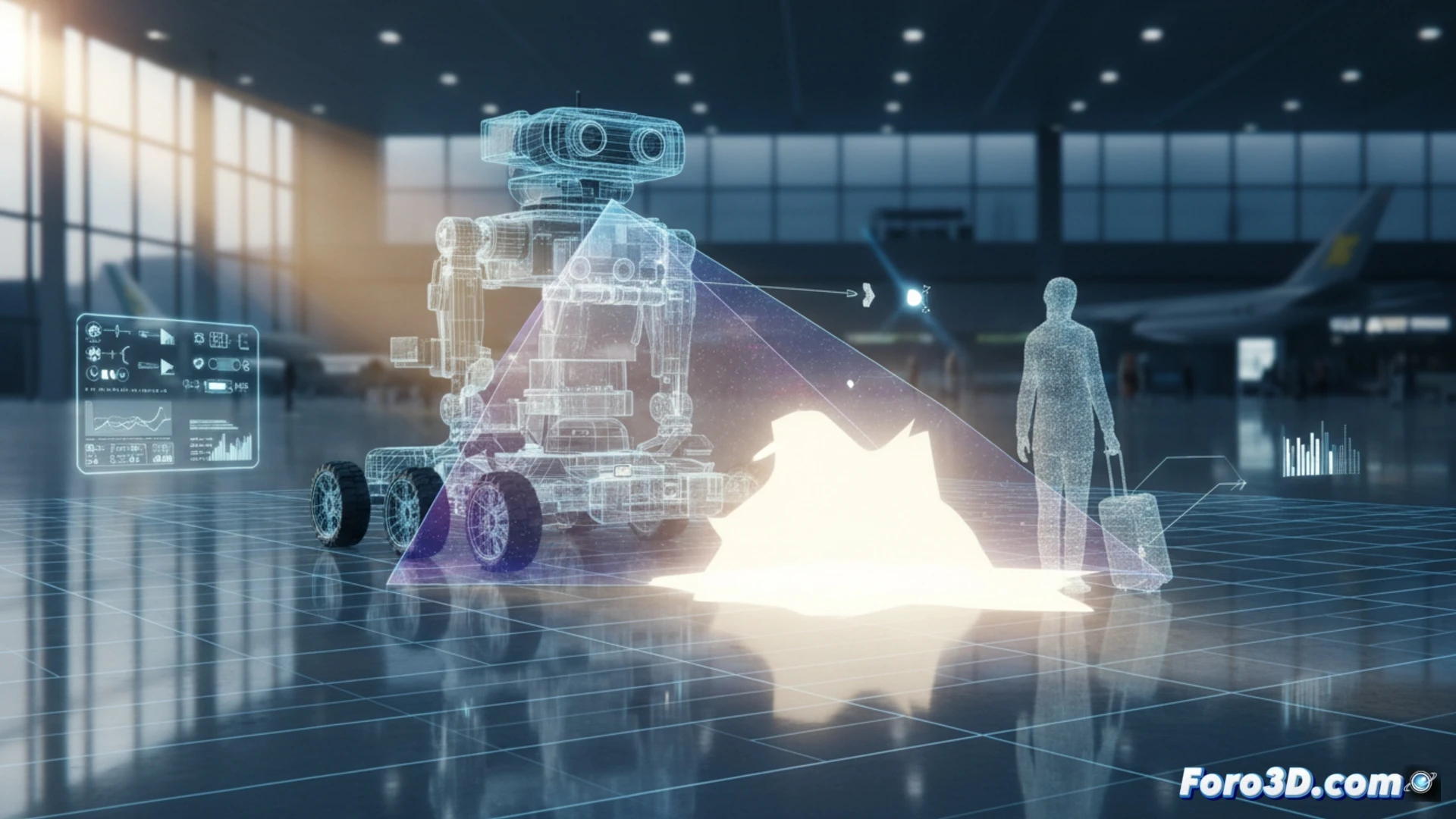
Un robot autonome de gestion des bagages a percuté un passager dans un terminal aéroportuaire pendant les heures de fort ensoleillement. L'enquête médico-légale s'est concentrée sur la reconstruction du champ visuel du système de caméras stéréoscopiques du robot afin de déterminer si le reflet du soleil sur le sol poli avait généré une zone d'erreur de profondeur. Ce cas représente une étape importante dans l'application des technologies 3D pour l'analyse des accidents impliquant des systèmes autonomes, où la perception visuelle a échoué en raison de conditions environnementales extrêmes.
Flux de travail médico-légal : photogrammétrie, LiDAR et simulation dans Unreal Engine 5 🛠️
Le processus a commencé par la capture des données de la zone de l'accident à l'aide d'un scan LiDAR et de la photogrammétrie avec RealityCapture, générant un nuage de points à haute densité du sol et de la zone d'impact. Dans CloudCompare, les données de l'environnement ont été alignées avec le modèle CAO du robot pour recréer la position exacte de ses capteurs au moment de l'incident. Ensuite, dans Unreal Engine 5, le champ visuel stéréoscopique a été simulé, en appliquant un matériau réfléchissant au sol et en configurant l'éclairage solaire réel. La simulation a confirmé que le reflet produisait un gradient de luminosité qui saturait les pixels dans une zone spécifique, annulant la disparité binoculaire et générant un angle mort optique de 40 cm de diamètre, exactement là où se trouvait le passager.
Leçons pour la conception de capteurs en robotique autonome 🤖
Cette expertise démontre que les systèmes de vision stéréoscopique, bien que robustes dans des conditions contrôlées, sont vulnérables aux surfaces spéculaires et aux changements d'éclairage extrêmes. La méthodologie appliquée, combinant photogrammétrie, alignement de nuages de points et simulation de capteurs, établit un pipeline médico-légal reproductible pour de futurs incidents impliquant des robots autonomes. La validation de l'hypothèse du reflet solaire oblige les fabricants à intégrer une redondance sensorielle, comme le LiDAR à temps de vol, pour atténuer ces angles morts optiques dans les environnements aéroportuaires.
Comment une reconstruction 3D médico-légale peut-elle identifier l'influence de l'occlusion visuelle par des ombres projetées sur la trajectoire d'un robot autonome lors d'un sinistre dans un aéroport ?
(PS : Dans le pipeline médico-légal, le plus important est de ne pas mélanger les preuves avec les modèles de référence... sinon vous vous retrouverez avec un fantôme dans la scène.)