Un robot chirurgical autonome, conçu pour réaliser des biopsies hépatiques de haute précision, a provoqué une lacération vasculaire lors d'une intervention. L'incident, initialement attribué à une erreur logicielle, a fait l'objet d'une expertise médico-légale 3D. L'enquête a combiné des simulations par éléments finis dans Ansys avec le scan métrique de l'aiguille pour reconstruire la dynamique de la défaillance, démontrant que la cause racine n'était pas algorithmique, mais mécanique et tissulaire.
Simulation par éléments finis et scan de l'aiguille 🧬
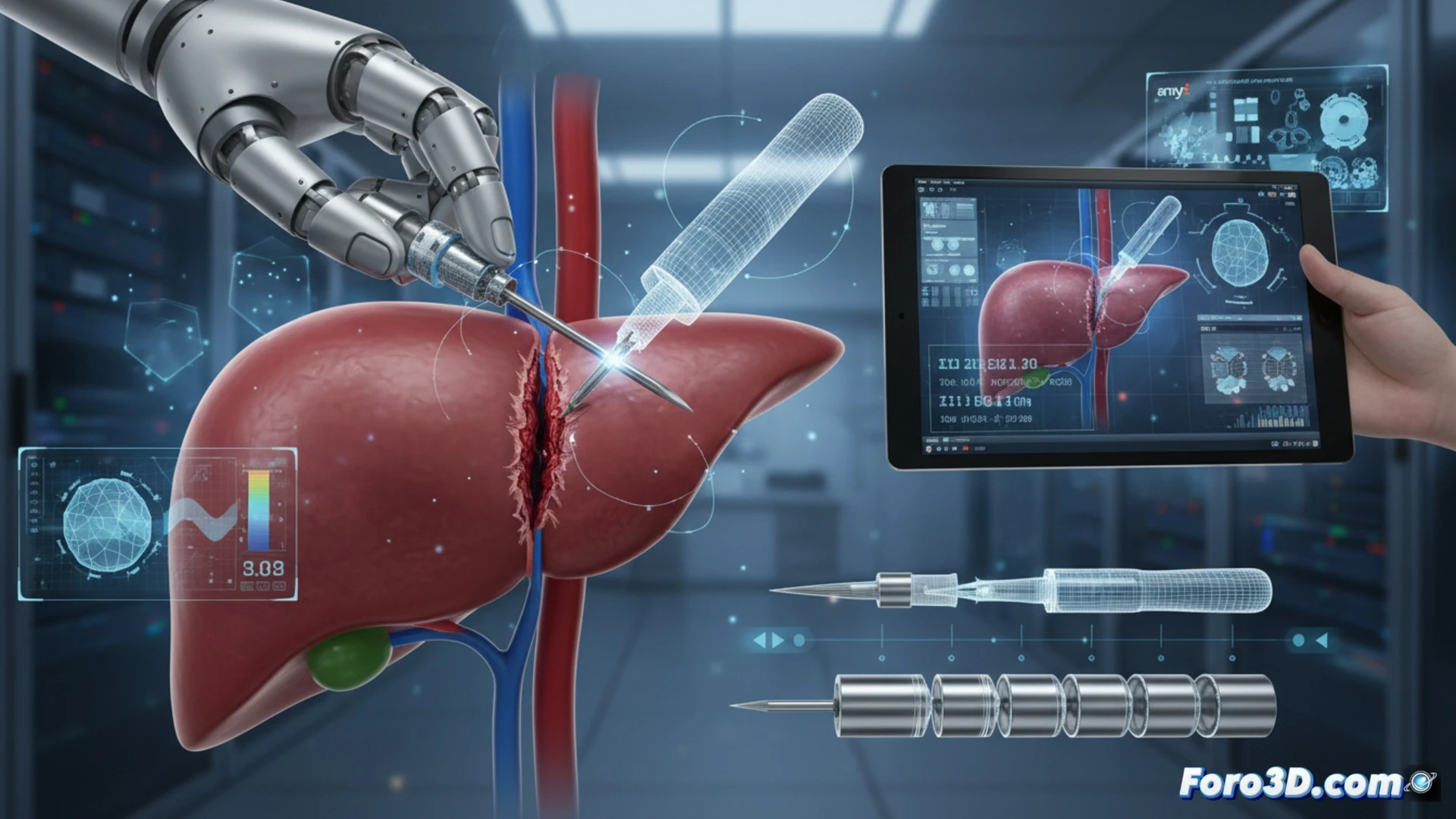
L'équipe médico-légale a numérisé la géométrie exacte de l'aiguille par scan 3D et l'a intégrée dans un modèle par éléments finis dans Ansys. L'anisotropie du parenchyme hépatique, caractérisée par des fibres de collagène à rigidité directionnelle variable, a été reproduite. La simulation a démontré qu'en traversant un lobe hépatique à haute densité fibrotique, la pointe de l'aiguille a subi un moment de flexion asymétrique. Ce couple, non pris en compte dans l'algorithme de guidage rigide du robot, a dévié la trajectoire de 4,2 millimètres, suffisamment pour sectionner un vaisseau porte voisin.
Leçons pour la robotique chirurgicale autonome 🤖
L'expertise met en évidence que les modèles de contrôle actuels sous-estiment l'interaction biomécanique du tissu vivant. Pour éviter de futures iatrogénies, les algorithmes de navigation autonome doivent intégrer des données d'anisotropie tissulaire obtenues par élastographie préopératoire ou simulation en temps réel. L'intégration de jumeaux numériques hépatiques, comme ceux générés dans Materialise Mimics, permettrait d'ajuster dynamiquement la force et l'angle d'insertion, comblant ainsi le fossé entre la rigidité théorique du modèle et la complexité réelle de l'organe.
Quelles leçons sur la conception de capteurs de rétroaction dans les robots chirurgicaux autonomes peut-on tirer de l'expertise 3D de cette défaillance de l'aiguille hépatique pour prévenir de futures lacérations vasculaires ?
(PS : et si l'organe imprimé ne bat pas, vous pouvez toujours y ajouter un petit moteur... c'est une blague !)