Deux Straddle Carriers sont entrés en collision dans un terminal portuaire autonome, un incident qui semblait être une défaillance mécanique jusqu'à ce que la reconstruction 3D des logs de capteurs fusionnés (LiDAR et Radar) pointe vers une cause plus subtile. La simulation dans Gazebo et Unreal Engine 5 a permis aux ingénieurs de recréer le moment exact de l'impact, révélant que le jumeau numérique de la zone de manœuvre affichait une position incorrecte de l'une des machines. La divergence provenait d'une latence critique sur le réseau 5G qui a désynchronisé les données en temps réel.
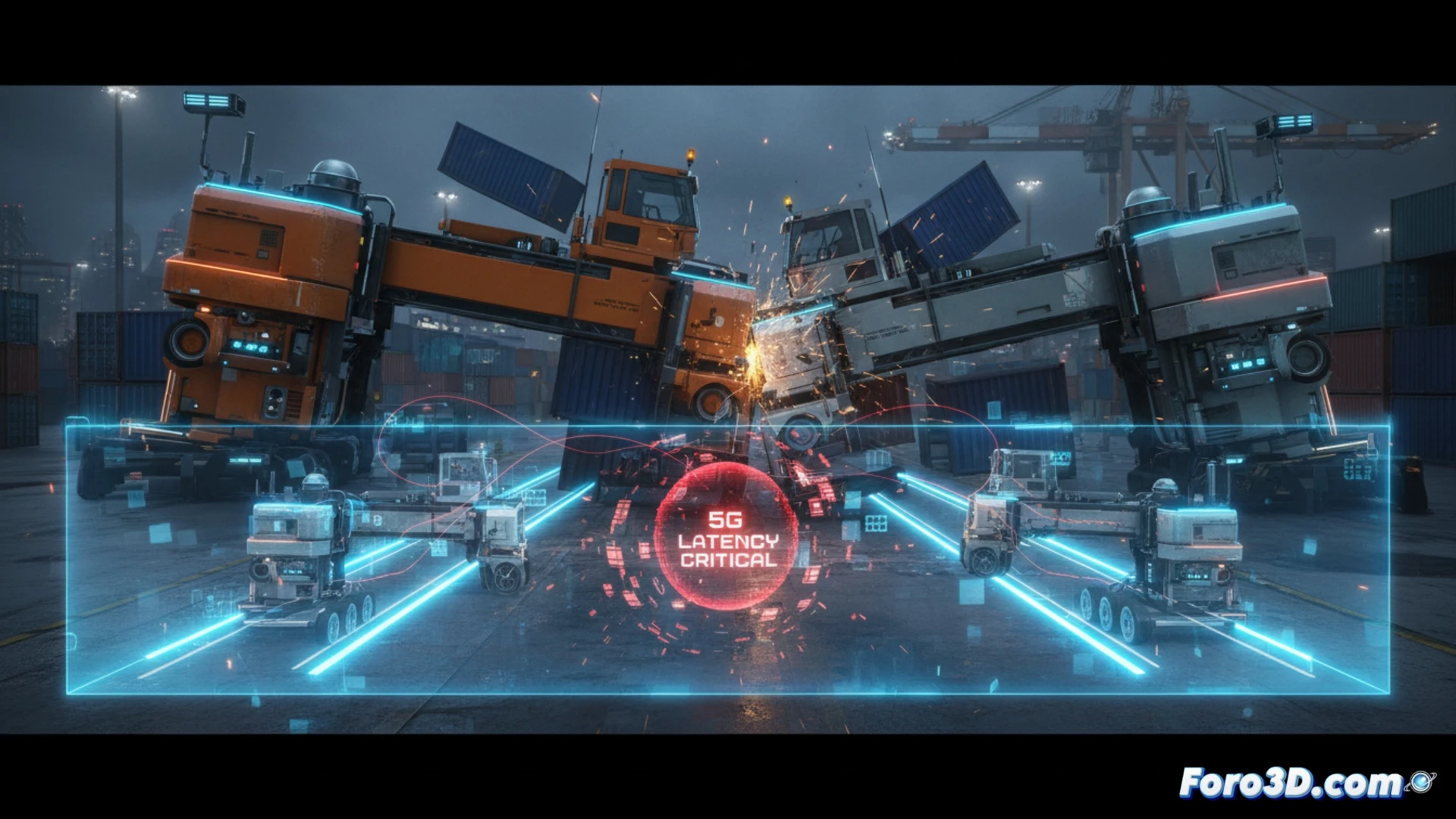
Reconstruction médico-légale avec Gazebo et Unreal Engine 5 🛠️
Le processus d'investigation a commencé par l'extraction des données brutes des systèmes LiDAR et Radar embarqués sur chaque chariot cavalier. Ces données ont été importées dans Gazebo pour une première simulation cinématique, où l'on a observé que les trajectoires enregistrées ne correspondaient pas au plan de route. Ensuite, le nuage de points fusionné a été chargé dans Unreal Engine 5, en utilisant le plugin Leica Cyclone pour gérer la haute densité de points. La visualisation dans le jumeau numérique a montré que l'un des véhicules apparaissait à un emplacement virtuel différent de sa position réelle au moment de la collision. La latence du réseau 5G, mesurée en microsecondes, avait provoqué la réception par le système de contrôle d'une mise à jour de position décalée, générant un ordre de mouvement erroné.
Synchronisation des données comme pilier de la sécurité autonome ⏱️
Cet incident souligne que la fiabilité d'un jumeau numérique ne dépend pas seulement de la précision du modèle 3D, mais de la synchronisation temporelle des flux de données. La fusion des capteurs LiDAR et Radar s'est avérée vitale pour détecter l'anomalie, mais le réseau 5G a agi comme un goulot d'étranglement. Pour éviter de futures collisions, il est proposé de mettre en œuvre un système d'horodatage (timestamping) au niveau matériel sur chaque capteur et un tampon de compensation de latence dans le jumeau numérique. La leçon est claire : dans la logistique autonome, la vitesse de la simulation doit égaler la vitesse du monde physique.
Comme le démontre l'incident dans le terminal portuaire autonome, où la latence 5G a provoqué la collision de deux Straddle Carriers malgré un jumeau numérique prédictif, quel seuil de latence maximale en millisecondes considérez-vous comme critique pour qu'un jumeau numérique industriel en logistique 3D puisse éviter les collisions entre portiques en temps réel, et quelles solutions proposez-vous pour mesurer et atténuer ce paramètre ?
(PS : simuler une usine industrielle, c'est comme jouer aux Sims, mais sans piscine pour enlever l'échelle)