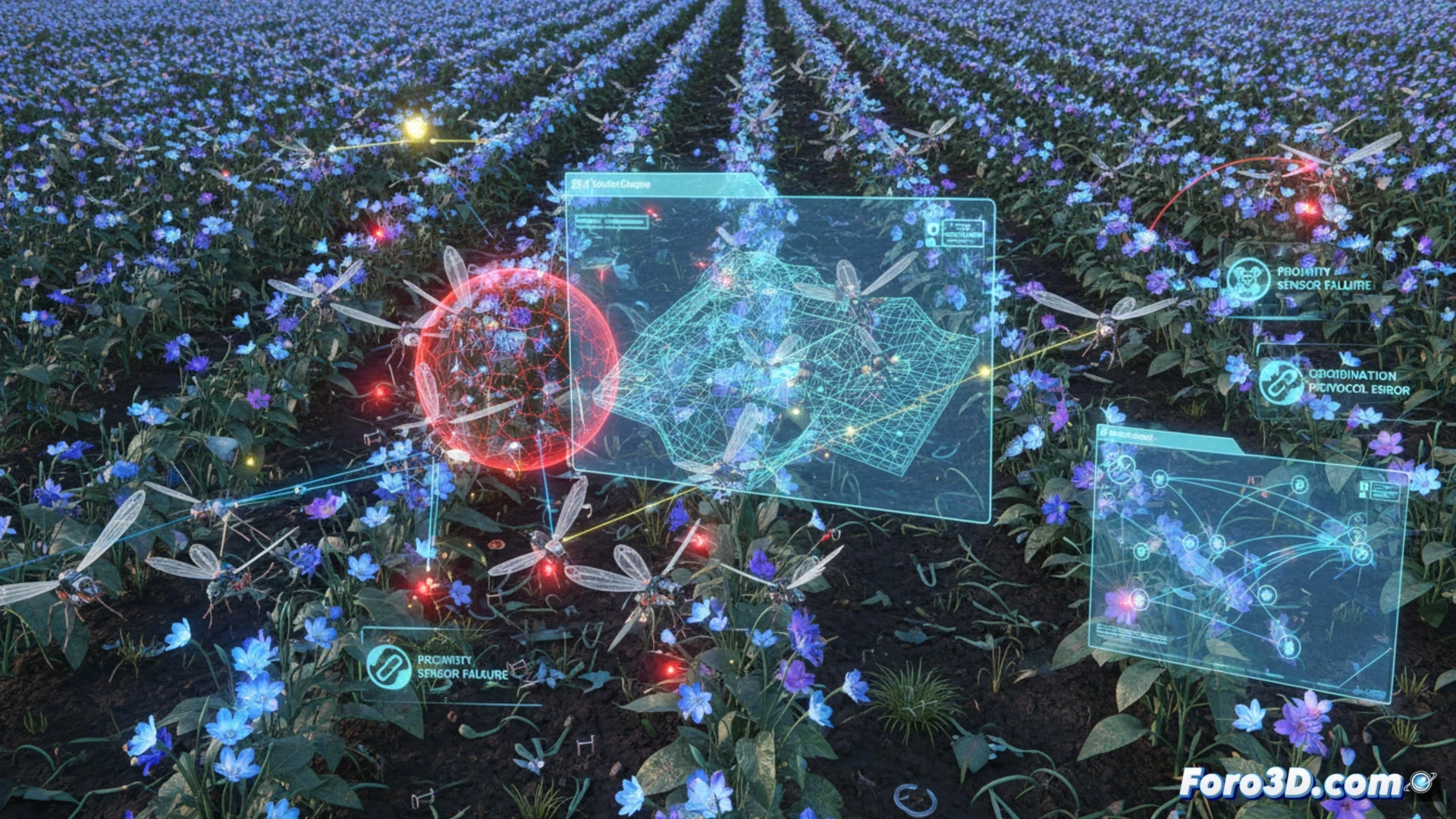
Un essaim de micro-drones pollinisateurs a détruit une récolte expérimentale suite à un dysfonctionnement catastrophique. La reconstruction 3D de l'incident, utilisant des outils comme RealityCapture et 3ds Max, permet d'analyser les trajectoires de vol et les données des capteurs de proximité. Ce cas expose des vulnérabilités critiques dans l'automatisation des cultures intensives, où la coordination entre robots est essentielle pour éviter les collisions et garantir une pollinisation efficace.
Simulation de trajectoires et capteurs dans V-REP et Gazebo 🤖
Pour comprendre la défaillance, il est nécessaire de modéliser le comportement de l'essaim dans des environnements de simulation robotique. V-REP permet de recréer la physique de vol des micro-drones et de programmer des algorithmes d'évitement d'obstacles basés sur des capteurs ultrasoniques ou LiDAR. Gazebo, quant à lui, offre un environnement plus réaliste pour tester l'interaction entre plusieurs agents et la culture. Dans ce cas, la reconstruction 3D suggère qu'une erreur dans l'étalonnage des capteurs de proximité a provoqué une désynchronisation dans l'essaim, conduisant les drones à entrer en collision entre eux et avec les plantes, au lieu de les polliniser.
Leçons pour la robotique agricole 🌱
La défaillance n'est pas un incident isolé, mais le reflet des défis actuels en robotique agricole. La dépendance à des capteurs à faible coût pour maintenir la viabilité économique des essaims introduit des risques de dysfonctionnement. La simulation préalable dans V-REP et Gazebo doit inclure des scénarios de bruit de capteur et de perte de communication. Ce n'est que grâce à une analyse 3D détaillée et une validation rigoureuse des algorithmes de vol que nous pourrons éviter que la prochaine récolte expérimentale ne devienne un champ de débris.
Quel rôle ont joué les algorithmes d'évitement de collisions en 3D dans la propagation de la défaillance de l'essaim et comment leur comportement chaotique aurait-il pu être modélisé lors de la reconstruction virtuelle du sinistre ?
(PS : Simuler des robots est amusant, jusqu'à ce qu'ils décident de ne pas suivre vos ordres.)