Un robot de picking est entré en collision avec une étagère dans un entrepôt à haute densité, provoquant un effet domino qui a renversé plusieurs rangées de chargement. Le sinistre aurait pu être évité si les capteurs LIDAR avaient correctement détecté la proximité de l'obstacle. Pour comprendre la défaillance, l'accident a été reconstitué à l'aide d'un jumeau numérique, en comparant les données réelles scannées avec FARO Scene aux simulations dans Gazebo et aux visualisations dans Unreal Engine 5. L'objectif était de localiser les angles morts générés par les réflexions spéculaires sur les surfaces métalliques du couloir.
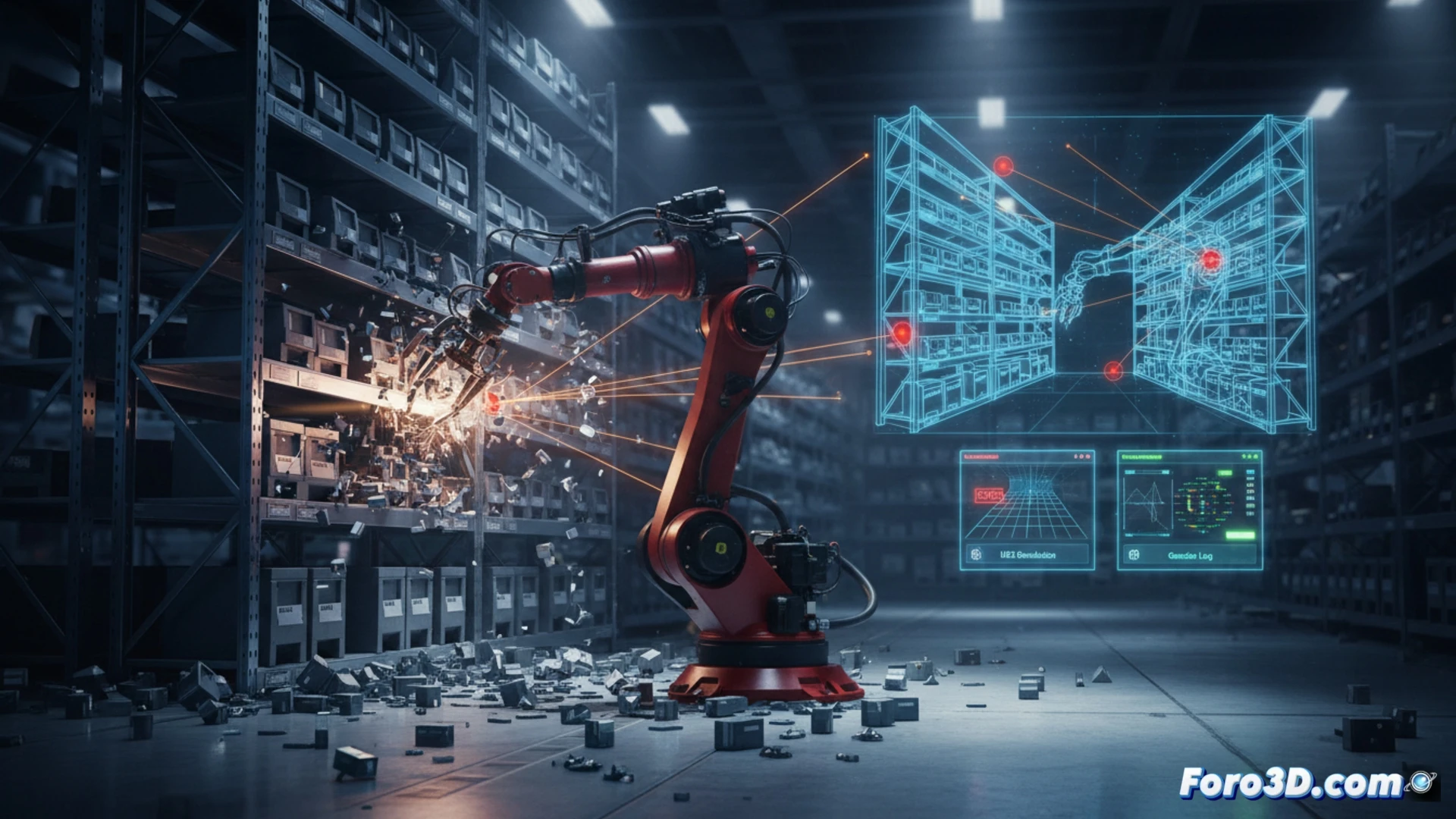
Reconstruction médico-légale avec FARO Scene et validation dans Gazebo 🛠️
La première étape a consisté à capturer la géométrie de l'entrepôt après le sinistre à l'aide de FARO Scene, générant un nuage de points de haute précision. Ce nuage a été importé dans Navisworks pour analyser la séquence de l'effondrement structurel. Ensuite, un jumeau numérique du robot et des étagères a été construit dans Gazebo, reproduisant les trajectoires originales du picking. En simulant le parcours du LIDAR dans cet environnement virtuel, des zones ont été identifiées où le faisceau laser frappait des panneaux d'acier poli sous des angles rasants, créant des reflets que le capteur interprétait comme un espace libre. La comparaison directe entre le nuage de points réel et la simulation a confirmé que ces angles morts coïncidaient exactement avec l'emplacement de l'impact.
Repenser la sécurité : de l'agencement physique à la simulation immersive 🚧
L'accident démontre que se fier uniquement aux capteurs LIDAR sans valider l'environnement virtuel peut être dangereux. La réflexion spéculaire sur les métaux est un angle mort critique dans les entrepôts à haute densité. Comme amélioration, il est proposé de reconcevoir l'agencement en ajoutant des marques diffuses aux coins des étagères et de repositionner les supports du LIDAR pour couvrir les angles problématiques. Unreal Engine 5 permet de visualiser ces modifications en temps réel, offrant aux ingénieurs de sécurité un outil immersif pour tester des configurations avant de les implémenter physiquement, réduisant ainsi le risque de nouveaux effets domino.
Quels paramètres du jumeau numérique dans Unreal Engine 5 ont échoué à prédire la collision du robot de picking et comment l'effet domino aurait-il pu être évité dans un entrepôt à haute densité ?
(PS : sur Foro3D, nous optimisons les routes comme nous optimisons les polygones : jusqu'à ce que l'ordinateur dise stop)