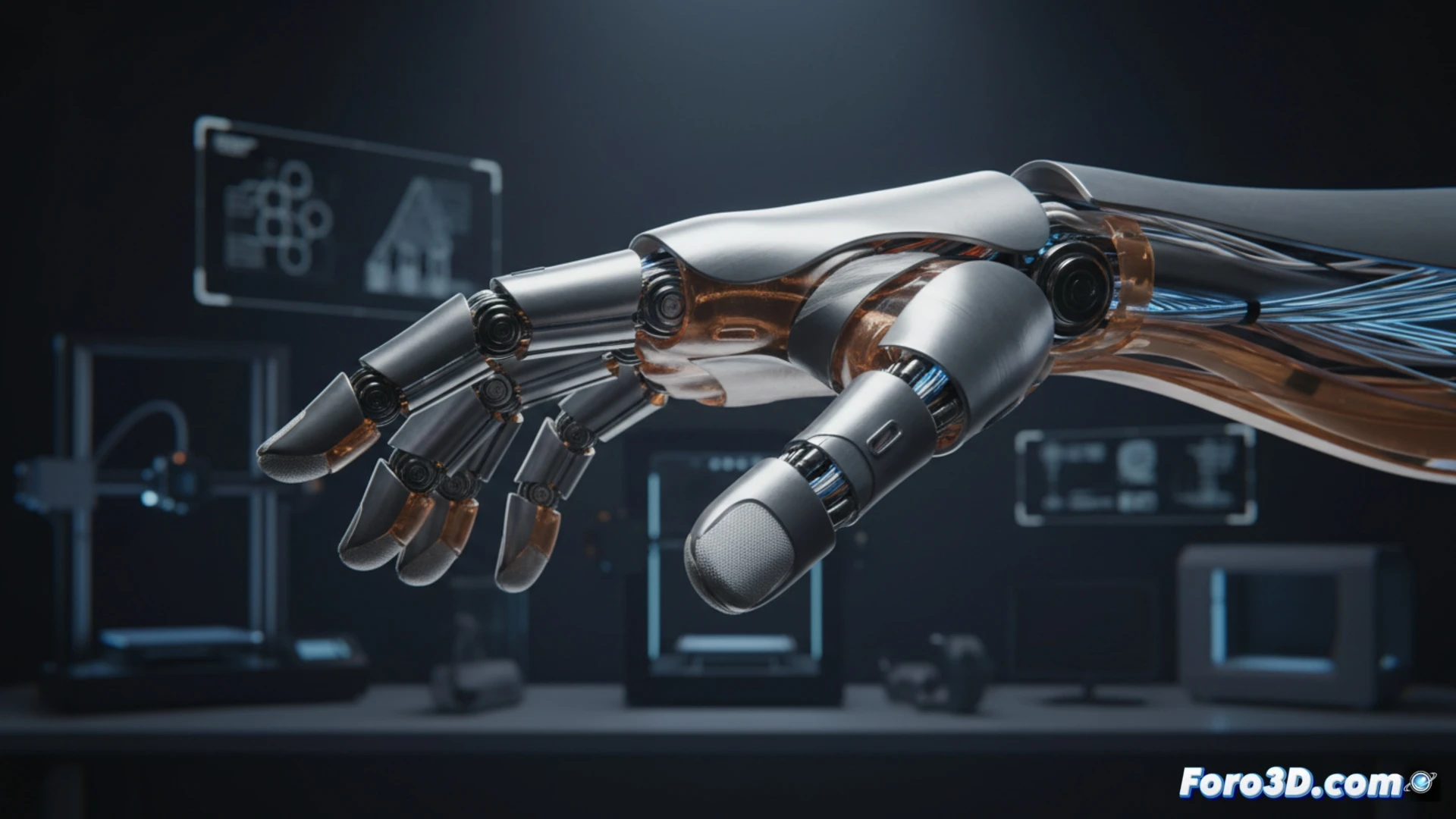
Des chercheurs de l'ETH Zurich ont franchi une étape clé en robotique souple en présentant une main robotique avancée fabriquée par impression 3D. Son design combine un squelette rigide avec des articulations souples et des tendons artificiels, imitant la complexité anatomique humaine. Cette approche permet des mouvements plus naturels et adaptables, surmontant les limitations des pinces rigides traditionnelles et nous rapprochant de robots avec une manipulation d'objets vraiment adroite.
Intégration du rigide et du souple : le rôle clé de la modélisation 3D 🤖
L'innovation technique réside dans l'intégration monolithique de matériaux durs et souples pendant le processus d'impression 3D. La modélisation numérique précise est cruciale pour concevoir le squelette interne rigide, les articulations flexibles et les canaux où se logent les tendons artificiels. Ces tendons, actionnés par des servomoteurs externes, simulent le système musculaire, conférant à la main une amplitude de mouvement supérieure et la capacité de s'adapter à la forme des objets. Cette fabrication additive permet de prototyper rapidement des designs complexes et bioinspirés qui seraient inviables avec des méthodes traditionnelles.
Un avenir de robots plus habiles et polyvalents 🚀
Cette avancée n'est pas seulement un accomplissement académique. L'habileté et la douceur de mouvement que procure cette technologie ouvre de nouvelles possibilités en automatisation industrielle pour manipuler des composants fragiles, en robotique d'assistance pour interagir avec les personnes de manière sûre, et dans des environnements d'exploration remota. L'impression 3D se consolide comme l'outil fondamental pour matérialiser des designs robotiques qui, s'inspirant de la nature, parviennent enfin à émuler son efficacité et son élégance.
Comment l'impression 3D révolutionne-t-elle le design et la fonctionnalité des mains robotiques bioinspirées en robotique souple ? 🤔
(PS : Simuler des robots est amusant, jusqu'à ce qu'ils décident de ne pas suivre tes ordres.)