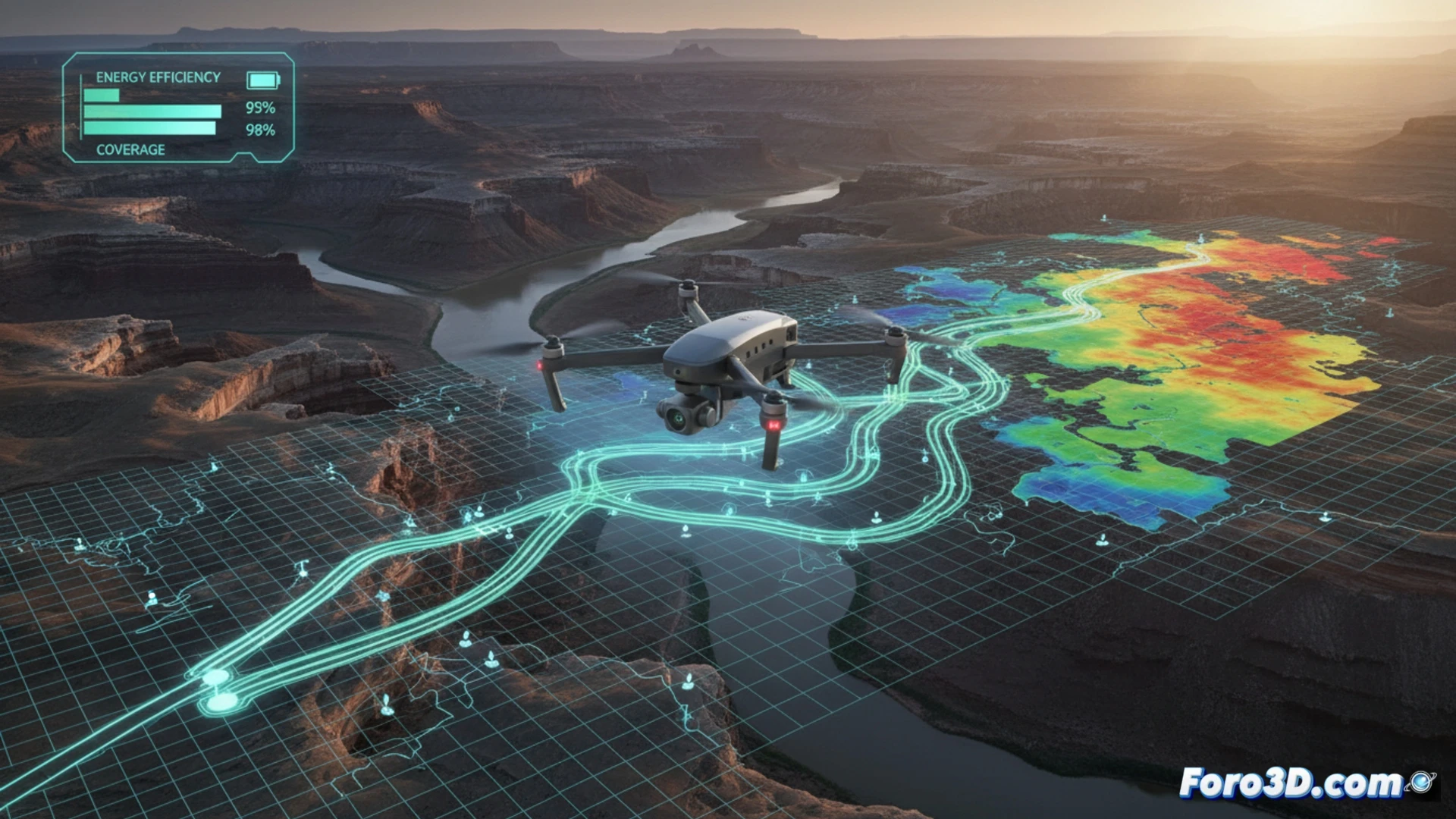
L'exploration autonome d'environnements inconnus avec des drones multirotors se heurte à une limite fondamentale : la batterie. Les algorithmes traditionnels, centrés sur la maximisation de la couverture ou la minimisation du temps, génèrent des trajectoires qui épuisent l'énergie prématurément. Des chercheurs proposent maintenant un nouveau cadre de travail, EAAE, qui intègre explicitement la gestion énergétique dans la planification, en utilisant un modèle de puissance prédictif pour sélectionner les routes les plus efficaces sans compromettre l'exploration.
Architecture modulaire et simulation pour la planification énergétique 🧠
Le framework EAAE fonctionne comme une couche supplémentaire dans l'exploration basée sur les frontières. D'abord, il regroupe les frontières en régions cohérentes et génère dynamiquement des trajectoires faisables vers les groupes les plus informatifs. Ensuite, une boucle d'estimation d'énergie offline, basée sur un modèle de puissance par vitesse des rotors, prédit la consommation de chaque candidat. La sélection finale minimise l'énergie tout en maintenant le progrès, grâce à une architecture à double couche qui garantit une exécution sûre. Sa validation s'effectue dans un pipeline complet au sein d'environnements 3D simulés de complexité croissante, démontrant des réductions de consommation par rapport aux méthodes basées uniquement sur la distance ou le gain d'information.
La simulation 3D comme pilier du développement robotique ⚙️
Ce travail souligne le rôle critique de la simulation avancée en robotique. Tester des algorithmes d'autonomie complexes, qui fusionnent perception, planification énergétique et contrôle dynamique, dans des environnements 3D virtuels est une étape indispensable. Cela permet d'itérer rapidement, d'évaluer les performances dans des conditions extrêmes et de valider la robustesse du système avant d'assumer les risques et les coûts des tests avec des drones physiques, accélérant le développement de robots véritablement autonomes et efficaces.
Comment les algorithmes de planification de trajectoires pour drones peuvent-ils incorporer des modèles prédictifs de consommation énergétique en temps réel pour maximiser la zone explorée dans des environnements inconnus avant l'épuisement de la batterie ?
(PD: Simuler des robots est amusant, jusqu'à ce qu'ils décident de ne pas suivre tes ordres.)