Le récent incident de bourrage dans une pharmacie robotisée n'est pas seulement une anecdote technique, mais une étude de cas parfaite pour la logistique industrielle. Dans cet article, nous analysons comment la visualisation 3D permet d'identifier le point de blocage exact dans le flux des médicaments, depuis l'entrepôt automatisé jusqu'au distributeur final, offrant une feuille de route pour l'optimisation du système.
Cartographie du flux logistique et point de blocage 🚧
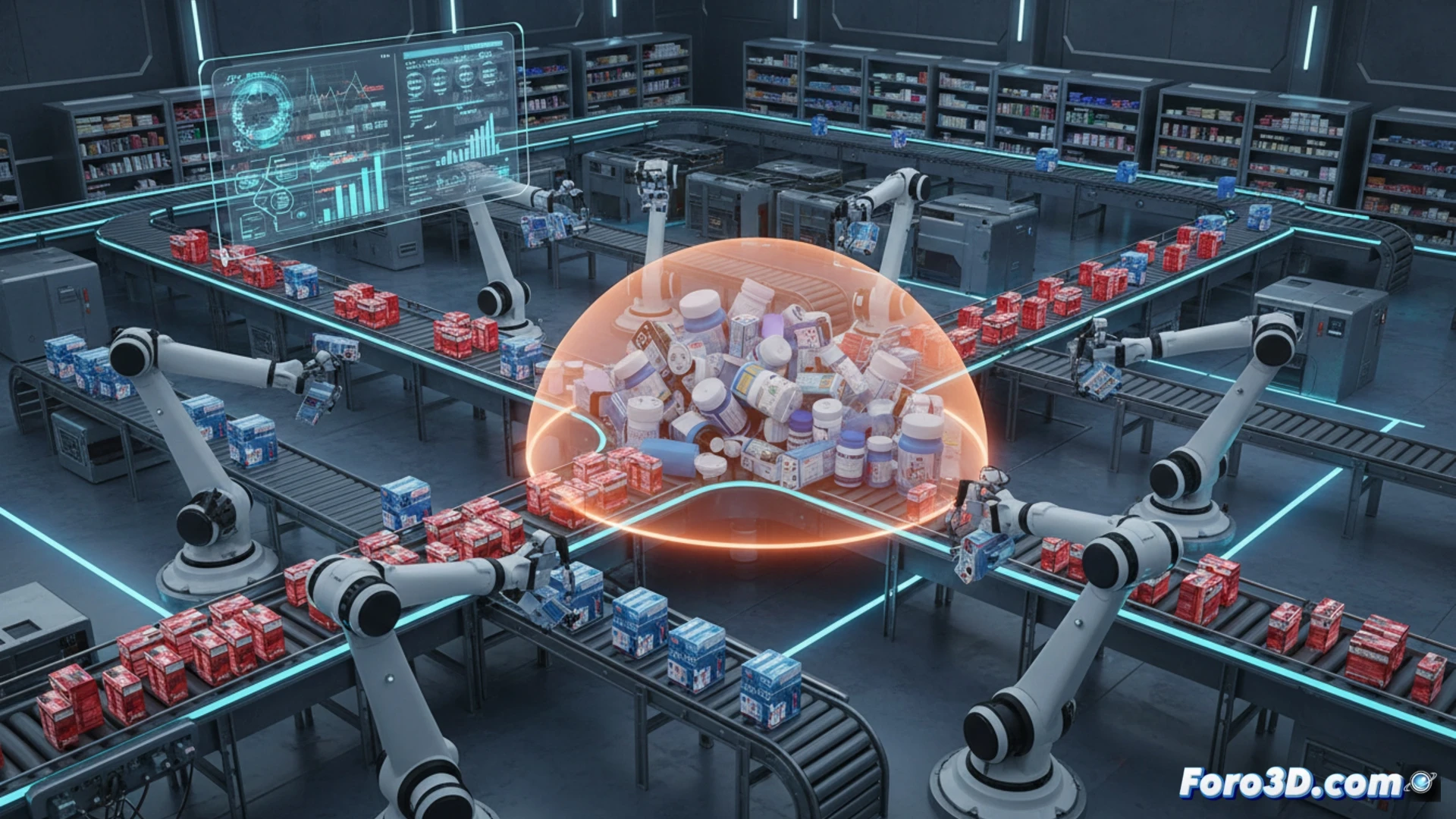
Pour comprendre le bourrage, nous devons modéliser en 3D le parcours du produit. Le processus commence dans l'étagère robotisée, où un bras pneumatique extrait la plaquette. Celle-ci passe sur un tapis roulant à vitesse variable qui l'achemine vers une trémie de tri. Le point critique se situe généralement à l'intersection entre le tapis et la trémie, où la géométrie de l'emballage ou l'accumulation de poussière génère une friction excessive. Grâce à la simulation par éléments discrets (DEM), nous pouvons visualiser l'accumulation d'unités et prédire le moment exact de l'effondrement du flux.
Reconception prédictive pour éviter les arrêts 🔧
La solution ne consiste pas seulement à nettoyer le capteur, mais à reconcevoir le goulot d'étranglement. En simulant en 3D l'inclinaison de la trémie et la texture de la surface du tapis, nous constatons qu'un angle de 35 degrés avec un revêtement antiadhésif réduit les bourrages de 80 pour cent. Cette approche, basée sur le jumeau numérique de la pharmacie, permet d'effectuer une maintenance prédictive et d'ajuster les paramètres du bras robotisé avant qu'une interruption réelle ne se produise dans la chaîne d'approvisionnement.
Comment la simulation 3D des bourrages dans les pharmacies robotisées pourrait-elle prédire et résoudre les goulots d'étranglement dans la logistique industrielle à forte rotation de stock ?
(PS : simuler une usine industrielle, c'est comme jouer aux Sims, mais sans les piscines pour enlever l'échelle)