Universal Robots UR5 et UR10 : cobots qui transforment la collaboration homme-machine
L'industrie avance vers des environnements où humains et machines partagent l'espace de manière sûre et efficace. Les robots collaboratifs ou cobots, menés par des modèles comme l'UR5 et l'UR10 d'Universal Robots, sont fondamentaux dans ce changement. Ces bras robotiques sont conçus pour opérer côte à côte avec les personnes, éliminant le besoin des traditionnelles cages de protection et redéfinissant la façon d'automatiser. 🤖
Sécurité intégrée dans la conception
La philosophie centrale de ces cobots repose sur une architecture de sécurité inhérente. Ils intègrent des capteurs de force et de couple avancés qui surveillent constamment leur mouvement. Si le robot détecte un contact inattendu, il peut s'arrêter immédiatement ou réduire drastiquement sa vitesse. Cette capacité permet de les déployer sur des lignes d'assemblage ou des cellules de travail où le personnel opère en proximité, ouvrant la porte à l'automatisation de tâches auparavant inviables.
Caractéristiques clés de sécurité :- Arrêt automatique en cas de détection de collision, grâce à des capteurs sur chaque articulation.
- Capacité à configurer des zones de vitesse réduite près des opérateurs.
- Conception avec des bords arrondis et sans points de pincement dangereux.
Leur succès réside dans la simplification du concept de robot industriel, rendant l'automatisation moins intimidante et plus comme un compagnon de travail.
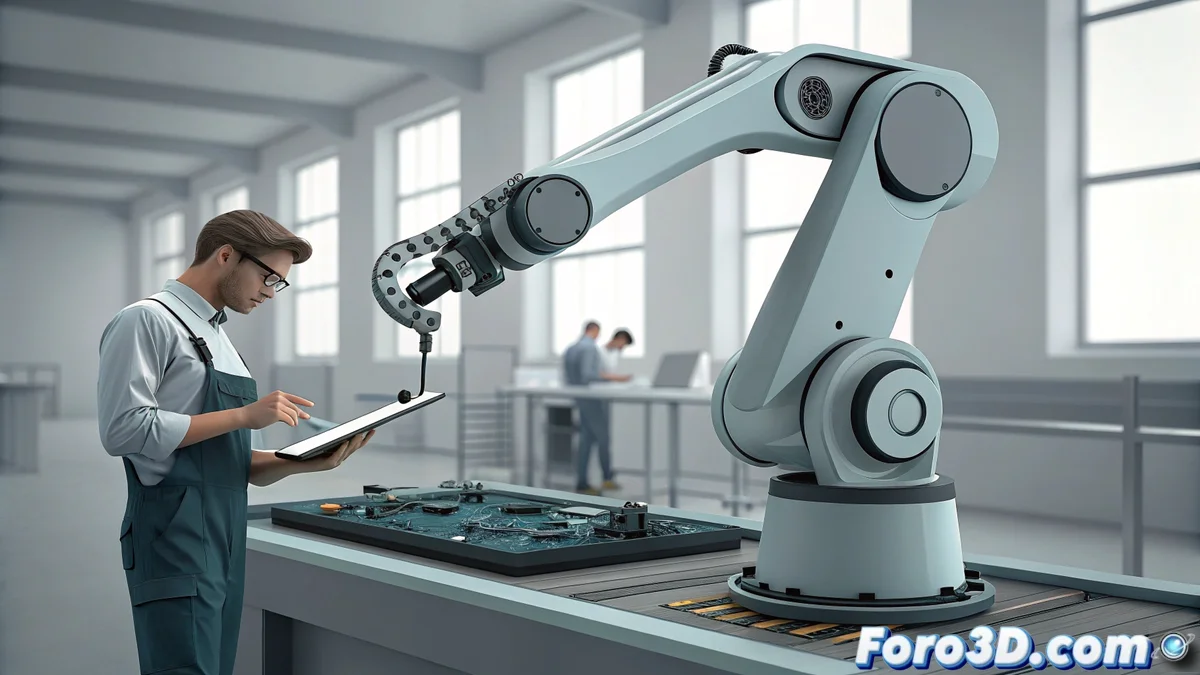
Programmer en guidant le bras à la main
L'une des plus grandes barrières à l'adoption de la robotique traditionnelle est la complexité de la programmation. Les cobots UR suppriment cet obstacle avec un système de programmation intuitive. L'utilisateur saisit physiquement le bras et le guide manuellement à travers les points clés de la tâche. Les mouvements sont enregistrés dans une interface graphique simple sur une tablette, sans besoin d'écrire une seule ligne de code. Cela permet à des techniciens ou opérateurs sans expérience en robotique de configurer des applications en heures.
Applications courantes qui peuvent être configurées :- Emballer et palettiser des produits de différentes tailles.
- Visser, coller ou souder en séquences prédéfinies.
- Alimenter et décharger des machines-outils comme des CNC ou des presses.
- Réaliser des inspections de qualité basiques avec des capteurs couplés.
Flexibilité pour s'adapter à la production actuelle
Leur conception légère et leurs options de montage sur piédestal, sur mur ou même sur chariots mobiles offrent une versatilité exceptionnelle. Ils peuvent être réimplantés facilement entre différentes stations de travail ou lignes de production, ce qui est idéal pour fabriquer des séries courtes ou des environnements qui changent fréquemment. La différence principale entre l'UR5 et l'UR10 réside dans leur portée et capacité de charge : l'UR5 gère des charges plus légères avec une grande précision, tandis que l'UR10 peut manipuler des composants plus lourds et volumineux. De plus, un large écosystème d'accessoires, comme des pinces pneumatiques, électriques ou des systèmes de vision artificielle, multiplie leurs usages possibles. ⚙️
Bien qu'ils promettent une collaboration sûre, il est crucial de souligner qu'ils ne sont pas une solution universelle. Il faut toujours effectuer une évaluation des risques spécifique pour chaque application, car certains processus avec des outils tranchants ou des forces élevées peuvent nécessiter des mesures de protection supplémentaires. Leur véritable valeur réside dans la démocratisation de l'accès à l'automatisation, particulièrement pour les petites et moyennes entreprises qui cherchent à être plus agiles et compétitives sans grandes investissements en infrastructure robotique complexe.