Kengoro : le robot humanoïde qui transpire comme un humain
Dans le Laboratoire JSK de l'Université de Tokyo, les ingénieurs ne cherchent pas seulement à construire des machines, mais à répliquer la vie. Leur création la plus avancée, Kengoro, est un effort pour copier avec précision le complexe système d'os, de muscles et de tendons d'un être humain. Cette approche radicale redéfinit la façon dont on conçoit et contrôle un robot, s'éloignant de la rigidité traditionnelle. 🤖
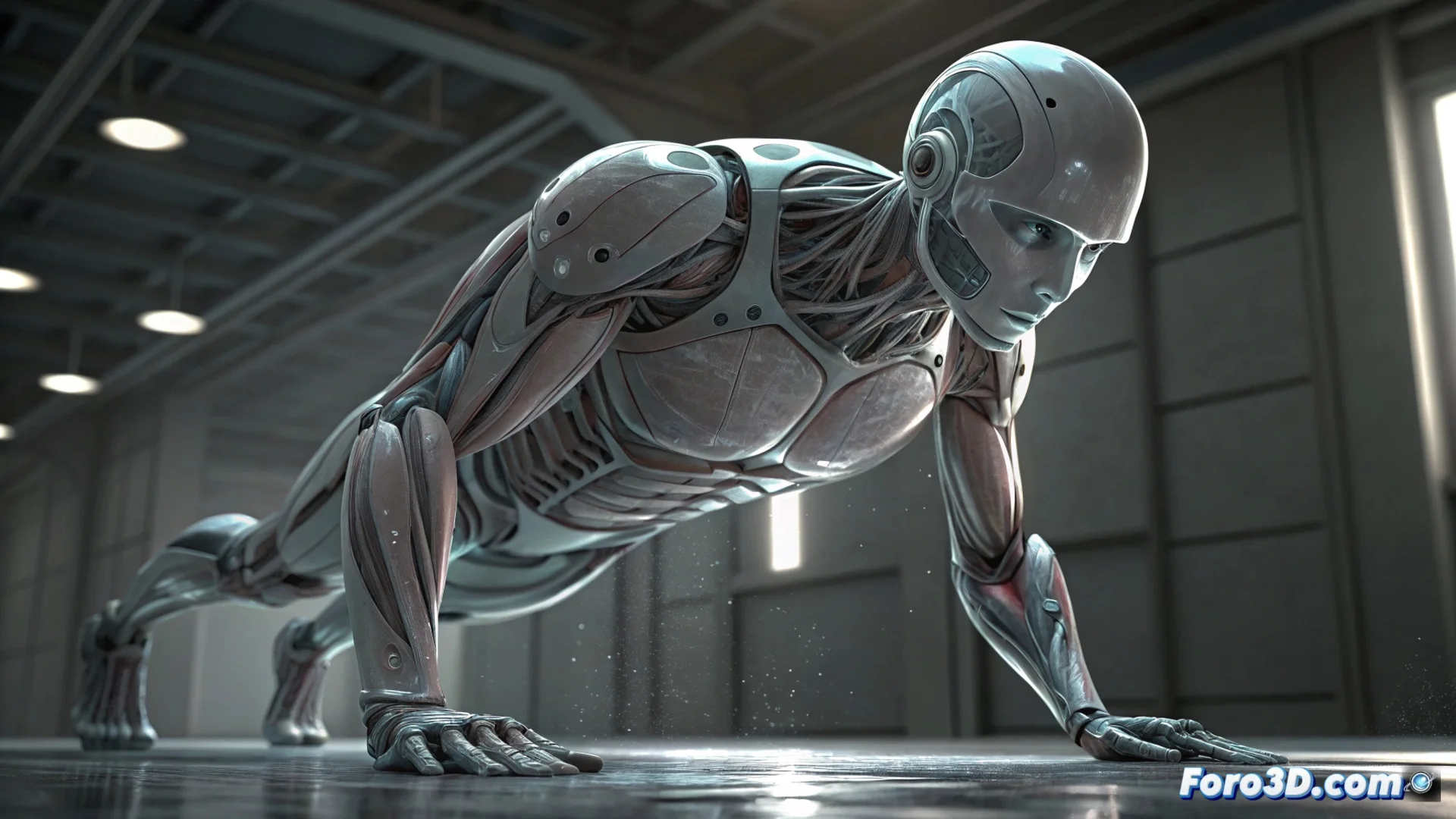
Un squelette qui transpire pour ne pas surchauffer
Le plus grand défi technique de Kengoro a été de gérer la chaleur générée par ses 108 moteurs indépendants. La solution n'est pas venue de ventilateurs ou de dissipateurs volumineux, mais d'imiter un processus biologique. Les chercheurs ont implémenté un système de refroidissement par évaporation. L'eau circule dans le châssis squelettique en aluminium poreux, s'infiltre à la surface et s'évapore, extrayant la chaleur de manière efficace, tout comme la sueur refroidit le corps.
Avantages clés du refroidissement par « sueur » :- Permet au robot de fonctionner de manière continue pendant plus longtemps, même sous des charges lourdes comme faire des flexions.
- Élimine le besoin de composants de refroidissement volumineux qui limiteraient le mouvement et la conception.
- Distribue le refroidissement de manière uniforme dans toute la structure, protégeant les actionneurs critiques.
Cette méthode de refroidissement est un changement de paradigme. Nous n'ajoutons pas de poids, nous utilisons la structure elle-même comme système thermique.
Mouvement organique grâce à une colonne vertébrale flexible
Prioriser une anatomie bio-inspirée confère à Kengoro des capacités de mouvement exceptionnelles. Sa colonne vertébrale flexible est fondamentale pour l'équilibre, absorber les impacts et exécuter des gestes dynamiques que les robots à torse rigide ne peuvent pas réaliser. Cette polyvalence ouvre de nouvelles frontières pour étudier comment les humains se déplacent.
Applications directes de cette conception :- Avancer dans le domaine de la robotique d'assistance, en créant des exosquelettes ou des prothèses avec des mouvements plus naturels.
- Mieux comprendre la biomécanique humaine pour prévenir les blessures ou améliorer les performances athlétiques.
- Fournir une plateforme physique réaliste pour tester des algorithmes de contrôle et de simulation.
L'avenir : d'imiter les mouvements à répliquer les sensations
Kengoro représente un saut vers des robots qui non seulement ressemblent, mais fonctionnent aussi comme des organismes vivants. L'étape logique suivante dans cette imitation pourrait intégrer des systèmes sensoriels permettant au robot de percevoir son environnement et son état interne de manière plus riche. Le projet pose les bases pour des machines qui interagissent avec le monde de manière véritablement organique et adaptable. 🔬