A collaborative robot designed to assist in dermatological procedures made an unwanted deep cut on a patient. The forensic analysis of the incident, through 3D reconstruction of force sensors and patient point cloud mapping, revealed a critical anomaly: the cobot confused a surgical gauze with the skin surface. This case highlights the risks of tactile perception in medical environments.
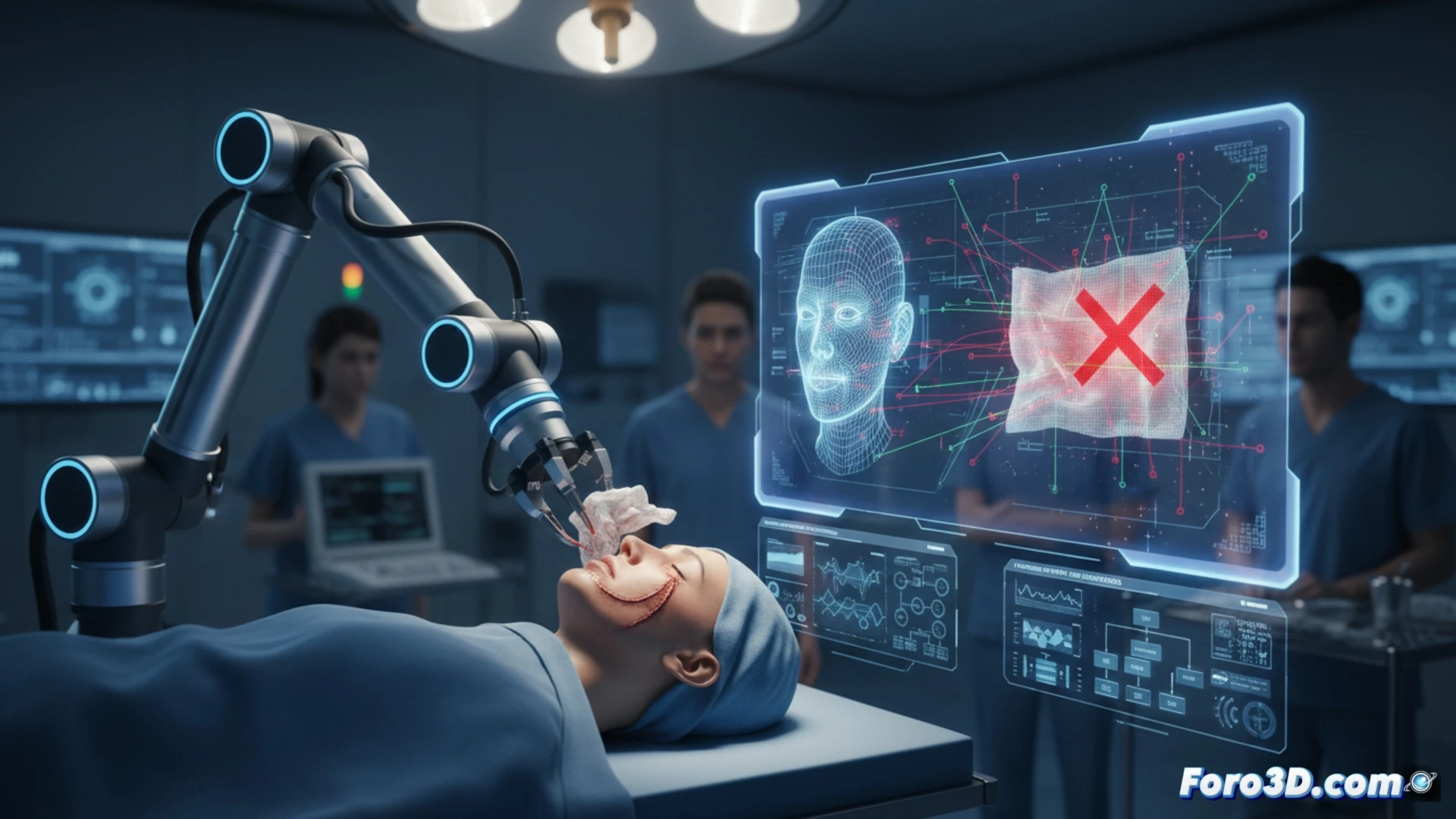
Error Reconstruction: Digital Twin and Point Clouds 🛠️
Using RoboGuide for kinematic simulation and Unreal Engine 5 for the digital twin, the surgical scenario was replicated. The integration of torque sensor data into the Digital Twin allowed visualizing the deviation from the planned trajectory. The analysis in CloudCompare of the post-incident point cloud showed a discontinuity on the patient's surface. The algorithmic comparison revealed that the mechanical impedance of the gauze, stored in the robot's database as soft tissue, generated a false contact reading, triggering the cutting maneuver.
3D Simulation as a Shield Against Sensory Failures 🛡️
This incident demonstrates that 3D simulation is not just a design tool, but a critical safety auditor. The integration of real-time point cloud data within the digital twin allowed identifying the confusion between materials (gauze vs. epidermis). For surgical automation, the challenge is not just the arm's precision, but the perception algorithm's ability to discern non-rigid objects. The lesson is clear: we must train cobots to doubt their touch.
How can the cobot industry integrate redundant haptic feedback systems to avoid tactile failures that compromise safety in precision medical applications such as cosmetic surgery?
(PS: Simulating robots is fun, until they decide not to follow your orders.)