An autonomous luggage-handling robot struck a passenger in an airport terminal during peak sunlight hours. The forensic investigation focused on reconstructing the robot's stereoscopic camera system field of view to determine if the sun's reflection on the polished floor created a depth error zone. This case represents a milestone in the application of 3D technologies for accident analysis involving autonomous systems, where visual perception failed due to extreme environmental conditions.
Forensic workflow: photogrammetry, LiDAR, and simulation in Unreal Engine 5 🛠️
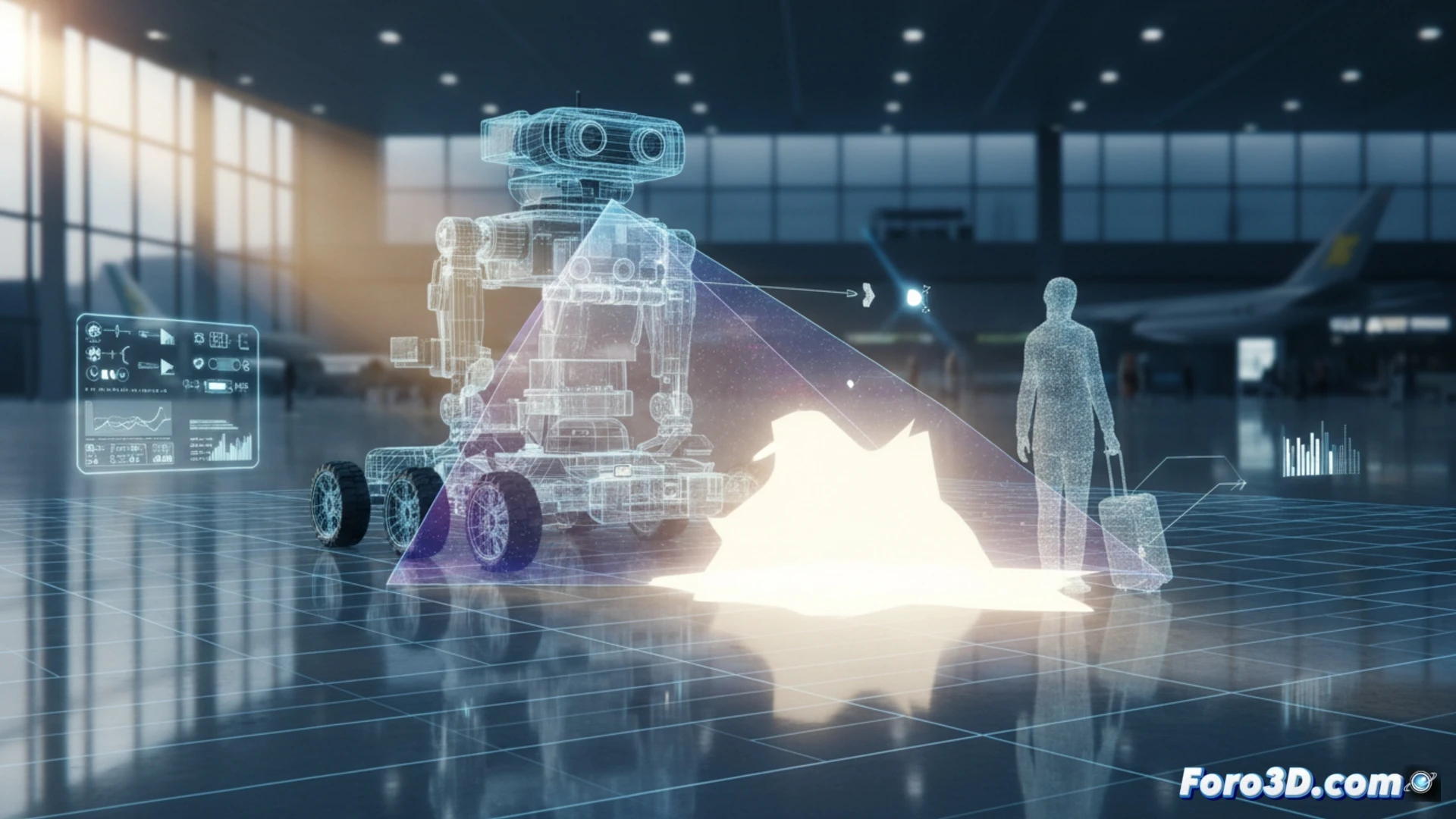
The process began with data capture of the accident area using LiDAR scanning and photogrammetry with RealityCapture, generating a high-density point cloud of the floor and impact zone. In CloudCompare, the environmental data was aligned with the robot's CAD model to recreate the exact position of its sensors at the time of the incident. Then, in Unreal Engine 5, the stereoscopic field of view was simulated, applying a reflective material to the floor and configuring the real solar lighting. The simulation confirmed that the reflection produced a brightness gradient that saturated pixels in a specific area, nullifying binocular disparity and generating a 40 cm diameter optical blind spot exactly where the passenger was located.
Lessons for sensor design in autonomous robotics 🤖
This forensic analysis demonstrates that stereoscopic vision systems, although robust under controlled conditions, are vulnerable to specular surfaces and extreme lighting changes. The applied methodology, combining photogrammetry, point cloud alignment, and sensor simulation, establishes a reproducible forensic pipeline for future incidents involving autonomous robots. The validation of the solar reflection hypothesis forces manufacturers to incorporate sensory redundancy, such as time-of-flight LiDAR, to mitigate these optical blind spots in airport environments.
How can a forensic 3D reconstruction identify the influence of visual occlusion due to projected shadows on the trajectory of an autonomous robot during an accident at an airport?
(PS: In the forensic pipeline, the most important thing is not to mix the evidence with the reference models... or you'll end up with a ghost in the scene.)