An autonomous surgical robot, designed to perform high-precision liver biopsies, caused a vascular laceration during a procedure. The incident, initially attributed to a software error, was subjected to a 3D forensic expert analysis. The investigation combined finite element simulations in Ansys with metric scanning of the needle to reconstruct the failure dynamics, demonstrating that the root cause was not algorithmic, but mechanical and tissue-related.
Finite element simulation and needle scanning 🧬
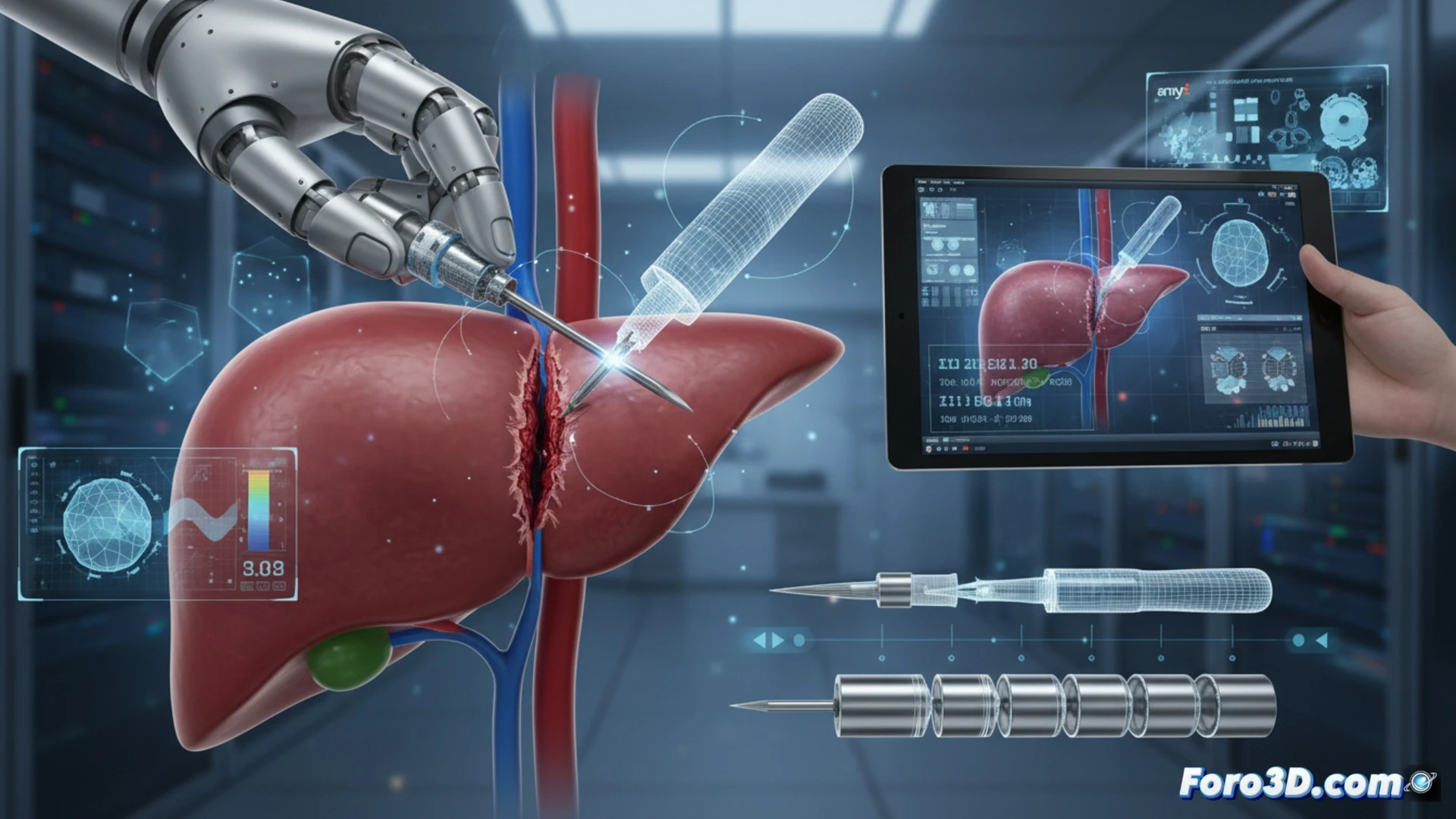
The forensic team digitized the exact geometry of the needle using 3D scanning and integrated it into a finite element model in Ansys. The anisotropy of the liver parenchyma, characterized by collagen fibers with variable directional stiffness, was reproduced. The simulation showed that, when traversing a liver lobe with high fibrotic density, the needle tip experienced an asymmetric bending moment. This torque, not accounted for in the robot's rigid guidance algorithm, deviated the trajectory by 4.2 millimeters, enough to sever a neighboring portal vessel.
Lessons for autonomous surgical robotics 🤖
The expert analysis shows that current control models underestimate the biomechanical interaction of living tissue. To prevent future iatrogenic injuries, autonomous navigation algorithms must incorporate tissue anisotropy data obtained through preoperative elastography or real-time simulation. The integration of liver digital twins, such as those generated in Materialise Mimics, would allow dynamically adjusting the force and insertion angle, bridging the gap between the theoretical stiffness of the model and the real complexity of the organ.
What lessons about feedback sensor design in autonomous surgical robots can be drawn from the 3D forensic analysis of this liver needle failure to prevent future vascular lacerations.
(PS: and if the printed organ doesn't beat, you can always add a little motor... just kidding!)