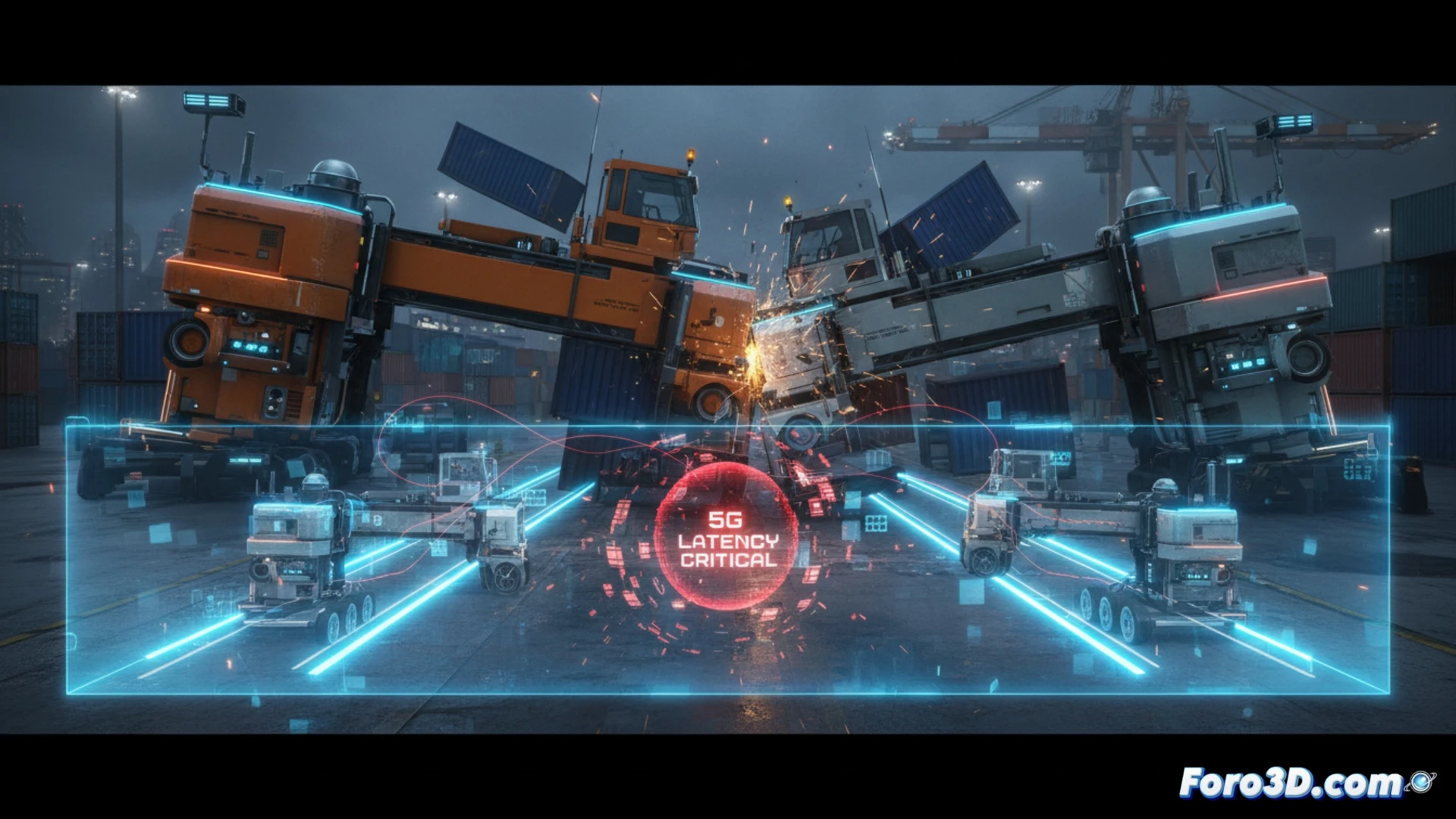
Two Straddle Carriers collided at an autonomous port terminal, an incident that seemed like a mechanical failure until the 3D reconstruction of fused sensor logs (LiDAR and Radar) pointed to a more subtle cause. The simulation in Gazebo and Unreal Engine 5 allowed engineers to recreate the exact moment of impact, revealing that the digital twin of the maneuvering area showed an incorrect position for one of the machines. The discrepancy originated from critical latency in the 5G network that desynchronized the real-time data.
Forensic reconstruction with Gazebo and Unreal Engine 5 🛠️
The investigation process began with extracting raw data from the LiDAR and Radar systems onboard each straddle carrier. This data was imported into Gazebo for an initial kinematic simulation, where it was observed that the recorded trajectories did not match the route plan. Subsequently, the fused point cloud was loaded into Unreal Engine 5, using the Leica Cyclone plugin to manage the high point density. The visualization in the digital twin showed that one of the vehicles appeared in a virtual location different from its real position at the time of the collision. The latency of the 5G network, measured in microseconds, had caused the control system to receive an outdated position update, generating an erroneous movement command.
Data synchronization as a pillar of autonomous safety ⏱️
This incident underscores that the reliability of a digital twin depends not only on the accuracy of the 3D model but also on the temporal synchronization of data streams. The fusion of LiDAR and Radar sensors proved vital for detecting the anomaly, but the 5G network acted as a bottleneck. To prevent future collisions, implementing a hardware-level timestamping system on each sensor and a latency compensation buffer in the digital twin is proposed. The lesson is clear: in autonomous logistics, the speed of the simulation must match the speed of the physical world.
As demonstrated by the incident at the autonomous port terminal, where 5G latency caused the collision of two Straddle Carriers despite a predictive digital twin, what maximum latency threshold in milliseconds do you consider critical for an industrial digital twin in 3D logistics to prevent collisions between gantries in real time, and what solutions do you propose to measure and mitigate this parameter?
(PS: simulating an industrial plant is like playing The Sims, but without pools to remove the ladder)