The accumulation of fouling organisms, or biofouling, represents a critical challenge for the operability of submersible vehicles, affecting their hydrodynamics and increasing energy consumption. The modern solution lies in digital twins: virtual replicas that integrate real-time data from pressure sensors, temperature sensors, and underwater cameras to model the growth of algae, barnacles, and mollusks on the hull. This technical article details the architecture of a digital twin applied to predictive biofouling monitoring, transforming a biological problem into a manageable data asset.
Digital Twin Architecture and Predictive Modeling 🌊
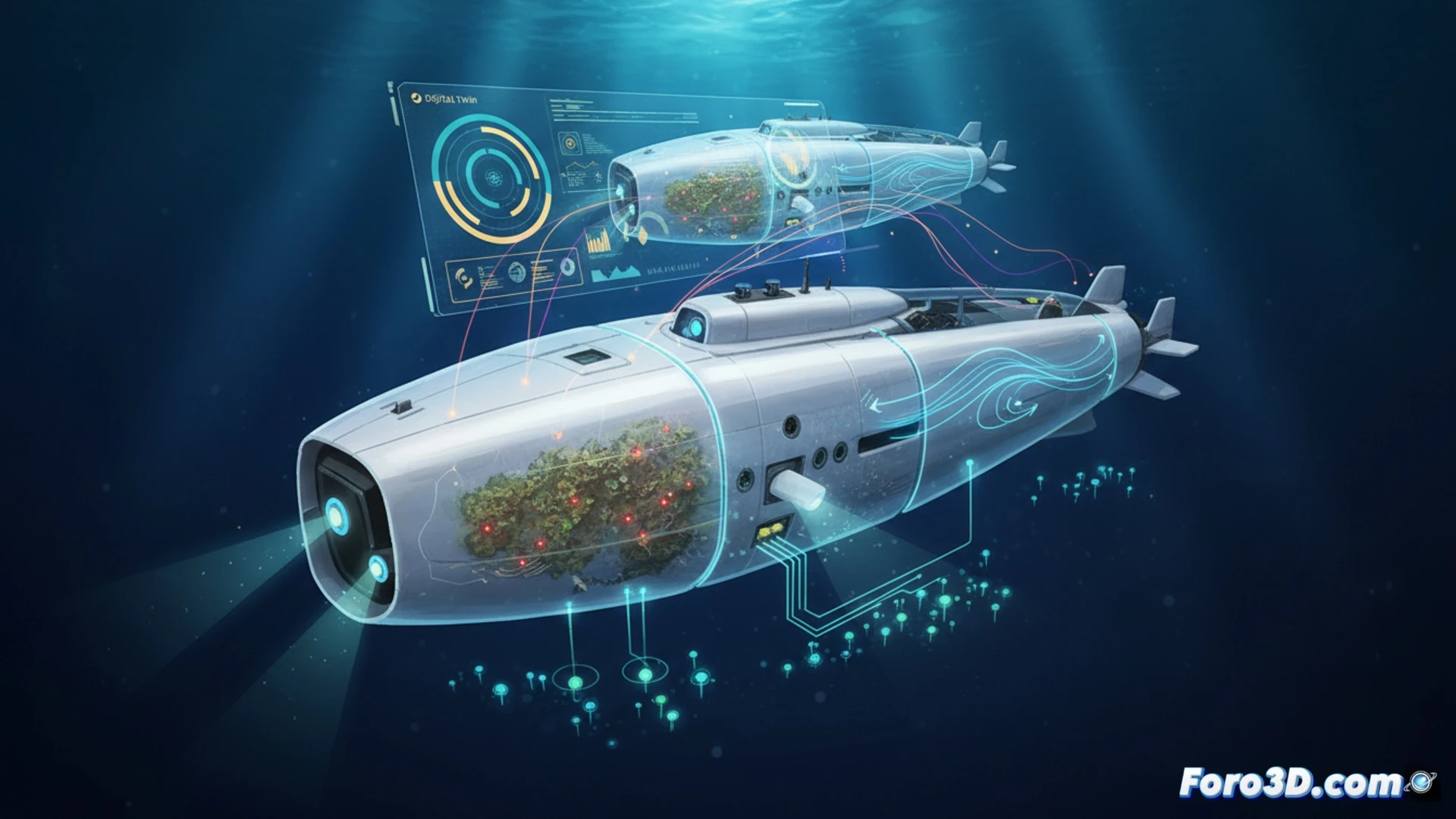
The construction of the digital twin begins with data acquisition via IoT sensors placed at strategic points on the submersible, such as the propeller, water intakes, and control surfaces. These sensors record parameters like surface temperature, hydrostatic pressure, and local flow, while high-resolution cameras capture images to segment and quantify organism coverage. The simulation engine, developed in Unity or Unreal Engine, uses this data to feed a reduced computational fluid dynamics (CFD) model, capable of predicting critical fouling points. The digital twin updates every hour, allowing operators to visualize the evolution of biofouling in 3D and receive early warnings when hull roughness exceeds a predefined threshold, thus optimizing maintenance routes and reducing operational costs by up to 20%.
The Ocean as a Virtual Laboratory 🐟
Beyond technical efficiency, this approach forces us to rethink the relationship between engineering and marine ecosystems. By integrating living organisms into a digital twin, we transform biofouling from an enemy to be eliminated into a biological indicator of ocean health. A sudden increase in fouling could signal changes in water temperature or nutrient availability, alerting to potential environmental alterations. Thus, the submersible ceases to be just a machine and becomes a sensor of its own environment, merging industrial monitoring with citizen science in a single virtual model.
How can a digital twin be integrated with impedance sensors and computer vision to predict in real-time the distribution and thickness of biofouling on the surface of a submersible?
(PS: My digital twin is currently in a meeting, while I am here modeling. So technically, I am in two places at once.)