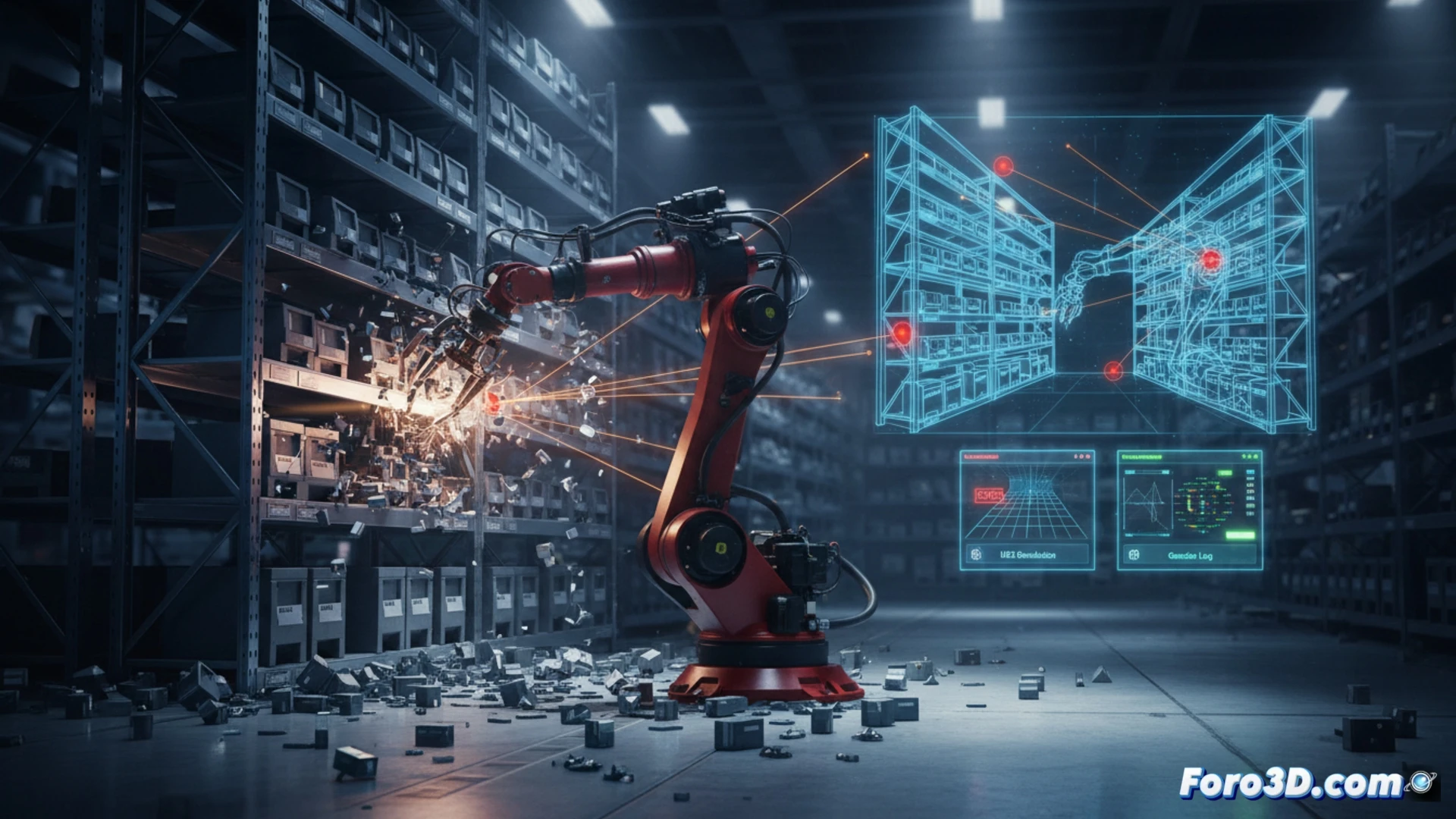
A picking robot collided with a shelving unit in a high-density warehouse, triggering a domino effect that knocked down several rows of cargo. The incident could have been avoided if the LIDAR sensors had correctly detected the proximity of the obstacle. To understand the failure, the accident was recreated using a digital twin, contrasting real data scanned with FARO Scene against simulations in Gazebo and visualizations in Unreal Engine 5. The objective was to locate the blind spots generated by specular reflections on the metallic surfaces of the aisle.
Forensic reconstruction with FARO Scene and validation in Gazebo 🛠️
The first step was to capture the post-accident warehouse geometry using FARO Scene, generating a high-precision point cloud. This cloud was imported into Navisworks to analyze the structural collapse sequence. Subsequently, a digital twin of the robot and shelving was built in Gazebo, replicating the original picking trajectories. By simulating the LIDAR's path in this virtual environment, zones were identified where the laser beam struck polished steel panels at grazing angles, creating reflections that the sensor interpreted as free space. The direct comparison between the real point cloud and the simulation confirmed that these blind spots coincided exactly with the location of the impact.
Rethinking safety: from physical layout to immersive simulation 🚧
The accident demonstrates that relying solely on LIDAR sensors without validating the virtual environment can be dangerous. Specular reflection on metals is a critical blind spot in high-density warehouses. As an improvement, it is proposed to redesign the layout by adding diffuse markings on the corners of the shelving and relocating the LIDAR mounts to cover the problematic angles. Unreal Engine 5 allows visualizing these modifications in real-time, offering safety engineers an immersive tool to test configurations before physically implementing them, thus reducing the risk of new domino effects.
What parameters of the digital twin in Unreal Engine 5 failed to predict the picking robot's collision and how could the domino effect in a high-density warehouse have been avoided?
(PS: at Foro3D we optimize routes like we optimize polygons: until the computer says enough)