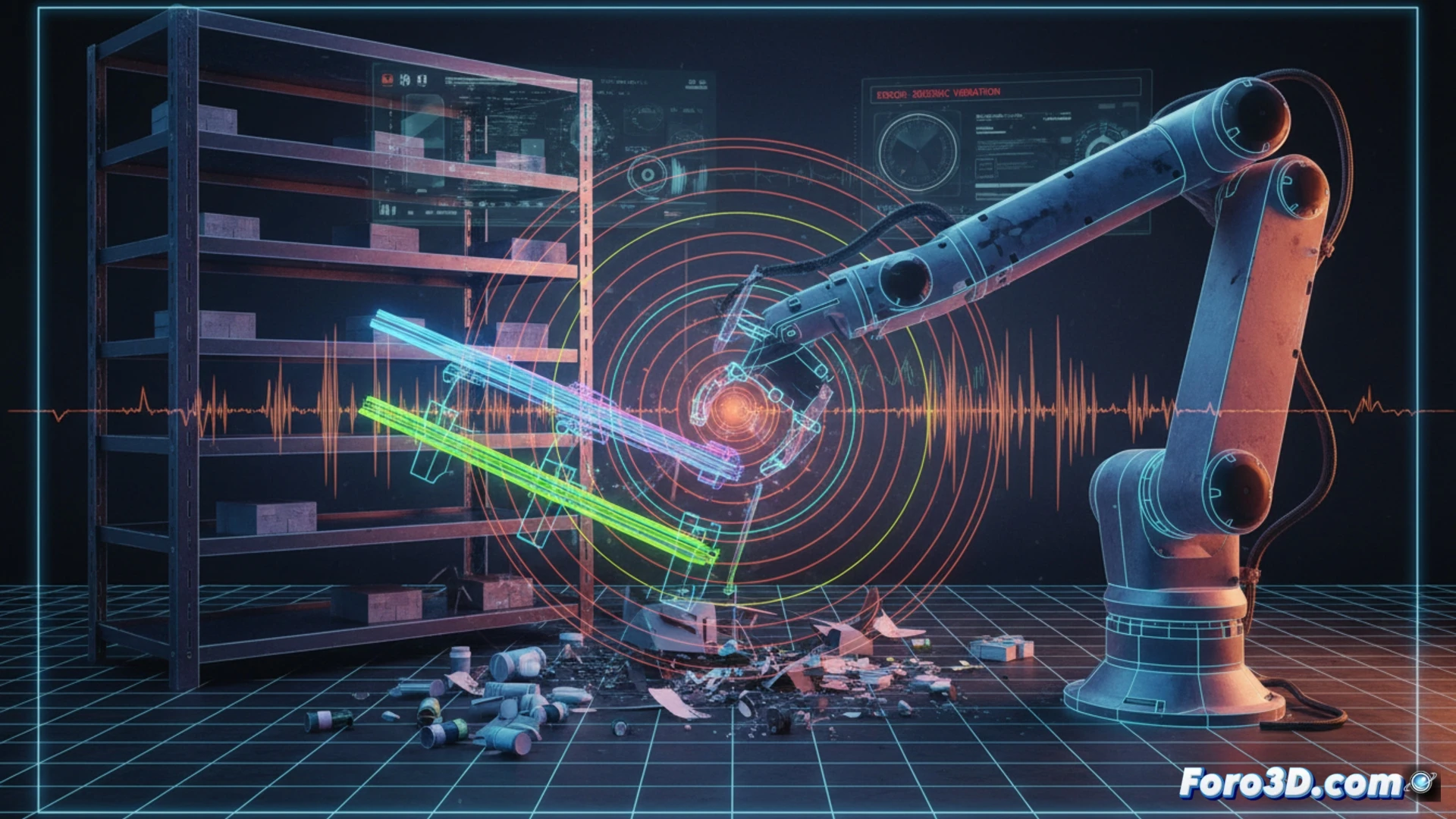
The incident occurred in a high-speed robotic pharmacy: the robotic arm violently collided with the shelves of the vertical storage system. At first glance, it seemed like a programming error, but the maintenance team suspected an external factor. 3D analysis revealed millimeter-scale deformations in the guide rails, caused by seismic vibrations not recorded by the building's standard sensors.
Inspection methodology with RoboGuide, RealWorks, and CloudCompare 🤖
The diagnosis began in RoboGuide, where the original arm trajectory was simulated. By comparing it with the PLC telemetry data, a deviation of 2.3 mm on the Z-axis was detected. To confirm the cause, the rails were scanned with a Trimble laser scanner, and the point clouds were processed in Trimble RealWorks. The alignment of the surfaces showed a bulge on the left rail. Using CloudCompare, a distance comparison (M3C2) was performed between the current state and the original CAD design, calculating deformations of up to 1.8 mm in the impact zone. Blender was used to generate a forensic animation correlating the moment of the seismic vibration with the trajectory of the end effector.
Lessons for calibrating automated systems ⚙️
This case demonstrates that robotic systems in pharmacies require structural monitoring beyond the robot's internal sensors. Low-amplitude seismic vibrations, even if they do not damage the building, can misalign precision rails. It is recommended to integrate accelerometers at the base of the shelving and perform periodic 3D scans with CloudCompare to detect sub-millimeter deformations before they cause collisions. The correction involved readjusting the rail anchors and recalibrating the arm in RoboGuide with a new error compensation map.
How reliable is the 3D collision analysis model for predicting the trajectories of a pharmaceutical robotic arm when faced with seismic vibrations not initially modeled in the robotic pharmacy environment?
(PS: Simulating robots is fun, until they decide not to follow your orders.)