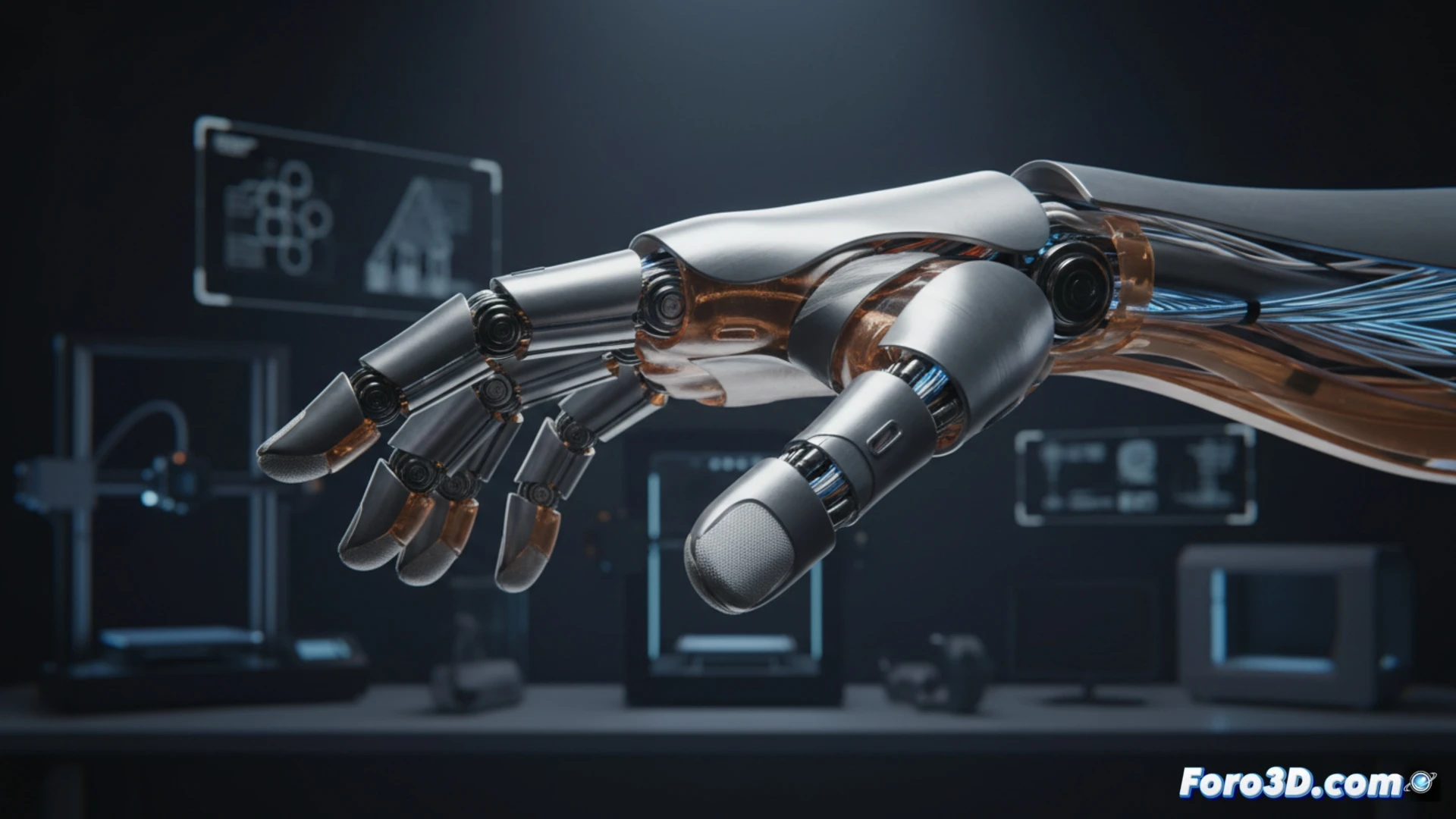
Researchers from ETH Zurich have taken a key step in soft robotics by presenting an advanced robotic hand manufactured using 3D printing. Its design combines a rigid skeleton with soft joints and artificial tendons, mimicking human anatomical complexity. This approach enables more natural and adaptable movements, overcoming the limitations of traditional rigid grippers and bringing us closer to robots with truly dexterous object manipulation.
Integration of rigid and soft: the key role of 3D modeling 🤖
The technical innovation lies in the monolithic integration of hard and soft materials during the 3D printing process. Precise digital modeling is crucial for designing the internal rigid skeleton, flexible joints, and channels where the artificial tendons are housed. These tendons, actuated by external servomotors, simulate the muscular system, giving the hand a superior range of motion and the ability to adapt to the shape of objects. This additive manufacturing allows for rapid prototyping of complex and bioinspired designs that would be unfeasible with traditional methods.
A future of more skilled and versatile robots 🚀
This advance is not just an academic achievement. The dexterity and smoothness of movement provided by this technology opens new possibilities in industrial automation for handling fragile components, in assistive robotics for safe interaction with people, and in remote exploration environments. 3D printing is consolidated as the fundamental tool for materializing robotic designs that, inspired by nature, finally achieve to emulate its efficiency and elegance.
How is 3D printing revolutionizing the design and functionality of bioinspired robotic hands in soft robotics? 🤔
(P.S.: Simulating robots is fun, until they decide not to follow your orders.)