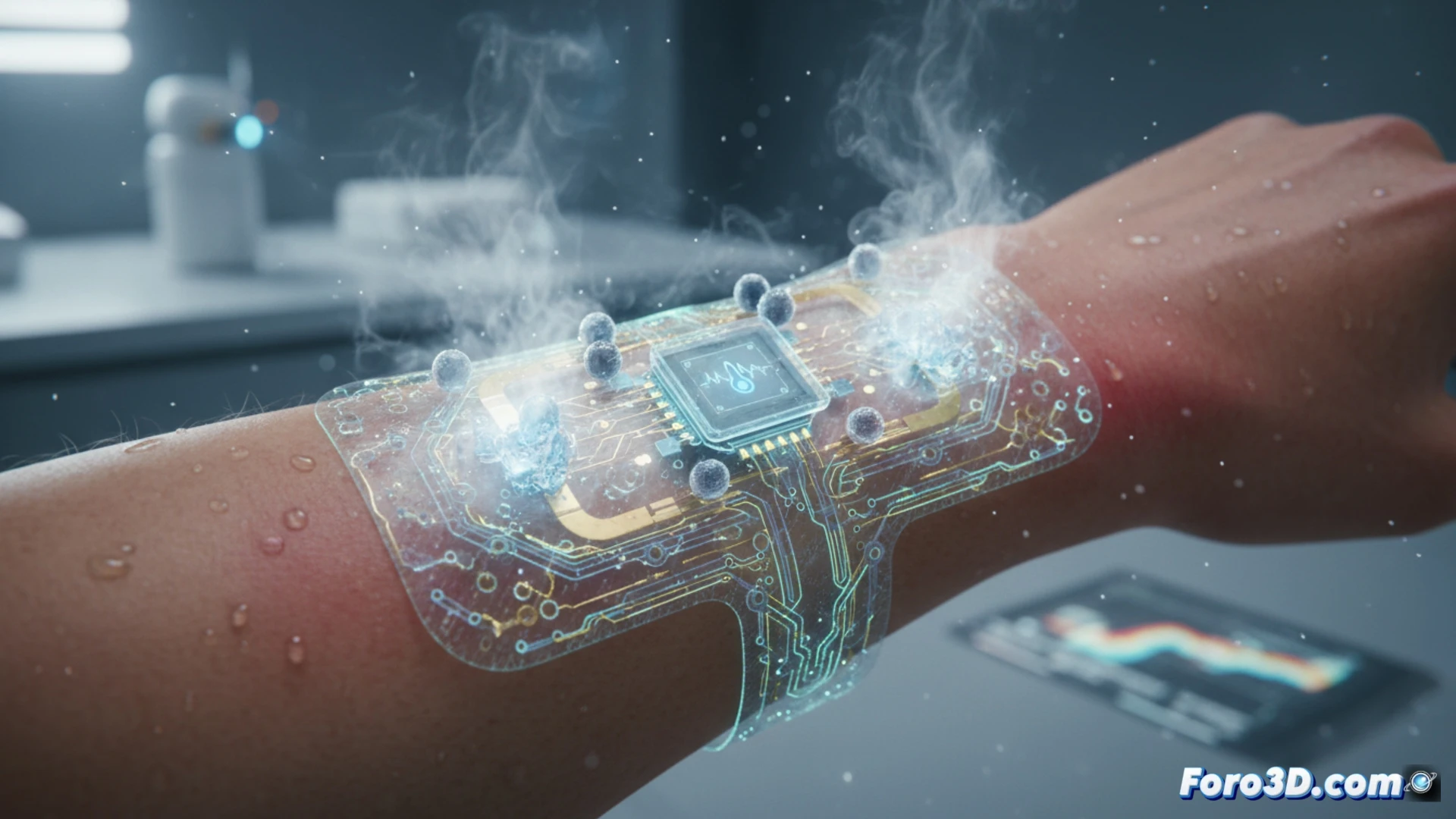
The integration of 3D printing in biomedicine has enabled the development of smart dermal patches that monitor sweat and respond to thermal stress. These devices, attached to the back of the neck or wrist, combine flexible sensors with microdeposits of encapsulated menthol. By detecting changes in the ionic conductivity of sweat, the patch releases microdoses of menthol to induce a cooling sensation, offering a non-invasive solution for personalized thermoregulation. 🧊
Multilayer design and microchannels for sensors and deposits 🧬
Additive manufacturing allows structuring the patch into three functional layers. The bottom layer, in contact with the skin, is printed with conductive hydrogels that integrate electrochemical pH and chloride sensors. The middle layer contains microchannels 200 microns in diameter that house the menthol encapsulated in thermosensitive liposomes. The top layer acts as a waterproof barrier and houses the flexible electronics, including a low-power microcontroller. 3D modeling simulates the diffusion of menthol through the polymer matrix, adjusting porosity to release between 0.5 and 2 mg per thermal event. Extrusion printing of thermoplastic polyurethane allows the device to be curved to fit the anatomy of the wrist or the back of the neck.
The challenge of simulating controlled release 🔬
The true innovation lies in the digital simulation of menthol release. Computational fluid dynamics models allow predicting how sweat activates liposomes and how body temperature accelerates diffusion. However, the biggest challenge is calibrating the sensor's sensitivity to avoid false positives during light exercise. 3D printing offers the flexibility to quickly iterate on the microchannel design, adjusting the geometry to achieve gradual and sustained release, transforming a simple patch into a real-time physiological response system.
How can biocompatibility and the precision of the menthol release mechanism in a 3D printed dermal patch be guaranteed when activated by thermal stress, without compromising the elasticity needed to conform to the skin?
(PS: and if the printed organ doesn't beat, you can always add a little motor... just kidding!)