The recent incident where a large-tonnage mining robot suffered a catastrophic break in its articulated arm during an extraction operation has brought focus to mechanical failures in extreme environments. This type of machinery, designed to withstand cyclic loads and abrasive conditions, failed suddenly, suggesting a collapse due to material fatigue or an overload undetected by the control system. Analyzing this event from an engineering perspective allows us to understand how to optimize the design and monitoring of these equipment.
Material fatigue, overload, and software errors in the failure ⚙️
The technical causes of this break can be divided into three main fronts. First, material fatigue: the mining robot operates under constant vibrations and impacts, which generates microcracks in steel or aluminum alloys that, over time, lead to brittle fracture. Second, operational overload: if the sensor system did not correctly calibrate the weight of the extracted material or the robot exceeded its maximum torque in a forced turn, the stress on actuators and joints surpassed the elastic limit. Third, a possible software error in trajectory control, where a faulty feedback loop ordered a sudden movement without compensating for inertia, generating a stress peak at the critical point of the structure.
How 3D simulation and digital twins prevent these failures 🛠️
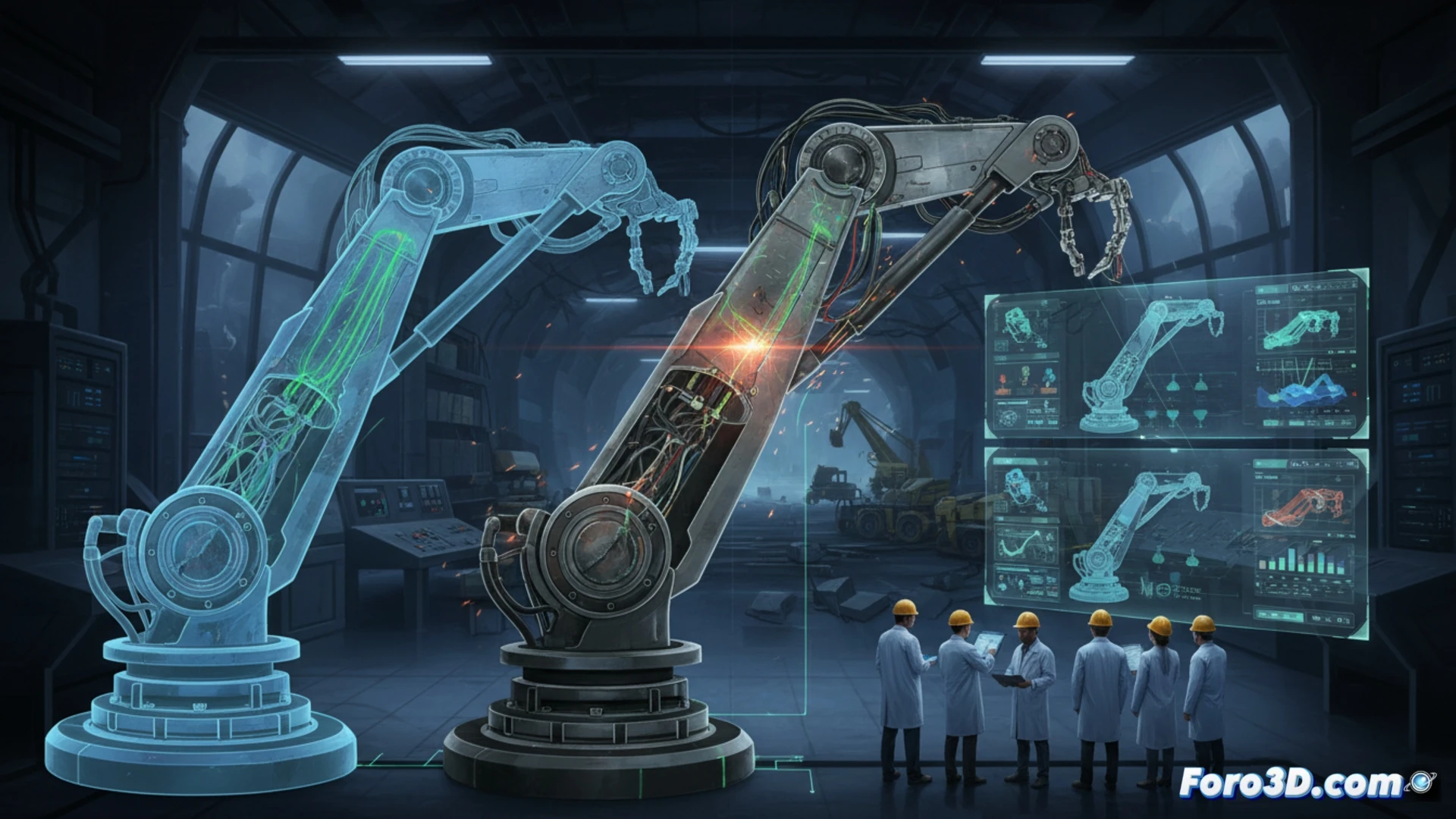
Simulation using digital twins is the key tool to predict and prevent this break. By modeling the robot in 3D with stress-strain data, heat maps can be visualized that indicate critical points where fatigue accumulates, such as ball joints or arm welds. A digital twin allows executing thousands of virtual load cycles without wearing out the real equipment, identifying overloads before they occur. Additionally, it integrates IoT sensor data to alert about anomalous vibrations, stopping the machine at the first sign of a microcrack, thus avoiding catastrophic breaks in automated mining.
How can a digital twin accurately predict and prevent fatigue failure modes in an articulated arm of a mining robot before a catastrophic break occurs, considering variables such as dynamic load and abrasion of the underground environment?
(PS: Simulating robots is fun, until they decide not to follow your orders.)