Robotics Learns from Natural Anatomy to Advance
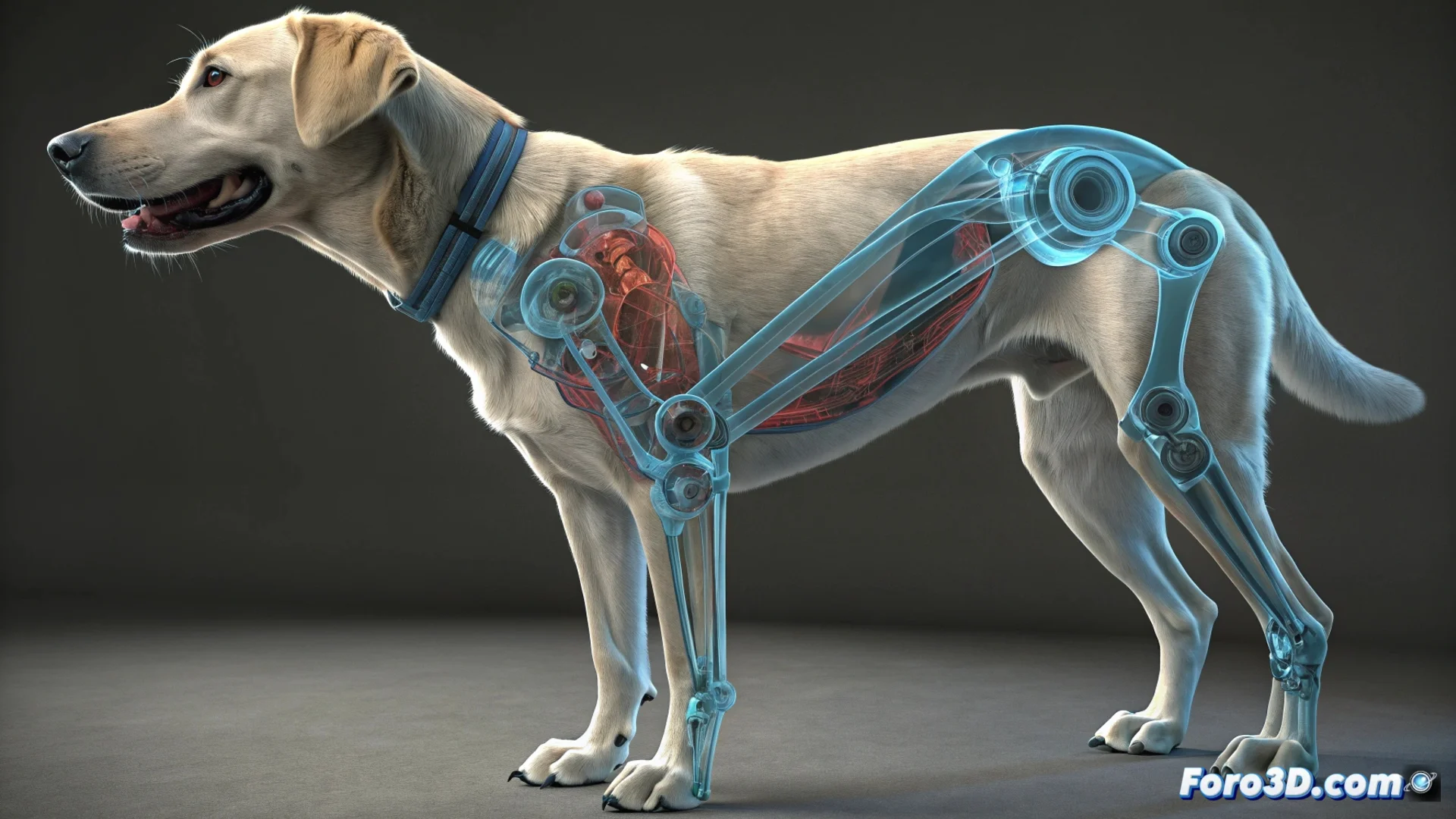
While current quadruped robots demonstrate surprising agility, their technological base differs radically from the systems perfected by nature. Robotic engineering is beginning to closely observe biomechanical principles to make a qualitative leap. 🔬
The Dominance of Rotary Actuators
The industry relies almost entirely on electric motors to generate movement. These components offer high precision and are relatively easy to control using advanced software. They allow robotic platforms to process sensor data, calculate trajectories, and maintain dynamic stability in real time on complex surfaces.
Key advantages of electric motors:- High precision and power in a compact package.
- Easy integration with electronic control systems.
- Ability to execute complex and coordinated movements repetitively.
“Sometimes, to advance, engineering must look back. The future of robotic locomotion might lie in rediscovering how a cat moves.”
The Lesson from Millions of Years of Evolution
Natural anatomy does not use motors, but a system of muscle fibers that contract. This approach spends energy in a more adaptable way and recovers better from impacts. Muscles and tendons function simultaneously as actuators, shock absorbers, and springs, storing and releasing elastic energy with great efficiency.
Benefits of imitating biomechanics:- Lighter robots with perceptibly more natural movement.
- Significant reduction in operational noise.
- Lower battery consumption by leveraging elastic energy.
A Path to More Capable Robots
Integrating principles of biomechanics into robotics does not mean abandoning electronics, but complementing it. The goal is to develop hybrid systems or new actuators that capture the versatility and resilience of muscle tissue. This bio-inspired approach promises machines that not only move, but interact with the environment in a radically superior and efficient way. 🚀