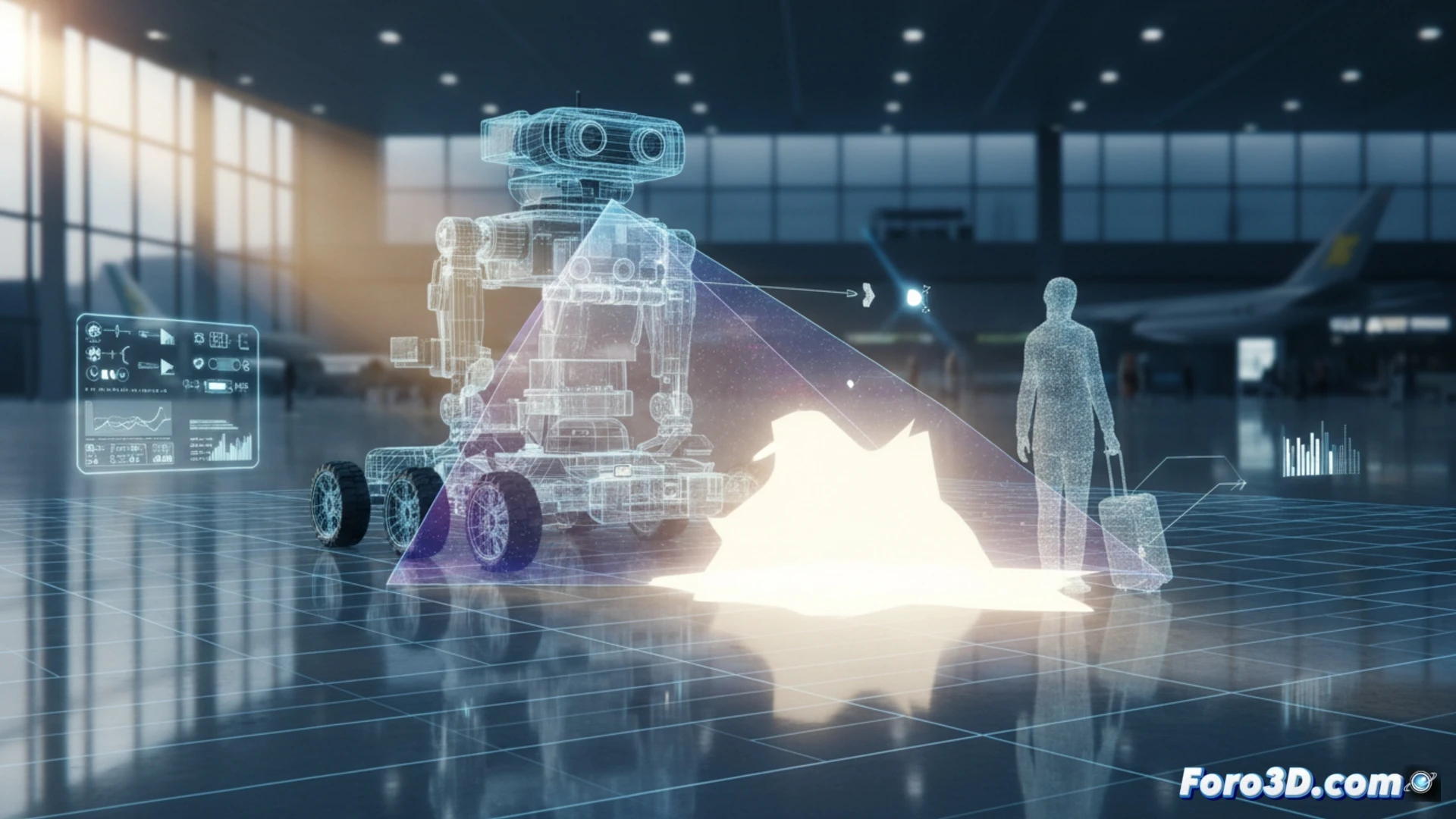
Ein autonomer Gepäckroboter erfasste einen Passagier in einer Flughafenterminal während der Hauptsonnenstunden. Die forensische Untersuchung konzentrierte sich auf die Rekonstruktion des Sichtfelds des stereoskopischen Kamerasystems des Roboters, um festzustellen, ob die Sonnenreflexion auf dem polierten Boden eine Tiefenfehlerzone erzeugte. Dieser Fall stellt einen Meilenstein in der Anwendung von 3D-Technologien für die Unfallanalyse mit autonomen Systemen dar, bei der die visuelle Wahrnehmung aufgrund extremer Umgebungsbedingungen versagte.
Forensischer Arbeitsablauf: Fotogrammetrie, LiDAR und Simulation in Unreal Engine 5 🛠️
Der Prozess begann mit der Erfassung von Daten des Unfallbereichs mittels LiDAR-Scan und Fotogrammetrie mit RealityCapture, wodurch eine hochdichte Punktwolke des Bodens und der Aufprallzone generiert wurde. In CloudCompare wurden die Umgebungsdaten mit dem CAD-Modell des Roboters abgeglichen, um die exakte Position seiner Sensoren zum Zeitpunkt des Vorfalls zu rekonstruieren. Anschließend wurde in Unreal Engine 5 das stereoskopische Sichtfeld simuliert, wobei ein reflektierendes Material auf den Boden aufgebracht und die reale Sonnenbeleuchtung konfiguriert wurde. Die Simulation bestätigte, dass die Reflexion einen Helligkeitsgradienten erzeugte, der die Pixel in einem bestimmten Bereich sättigte, die binokulare Disparität aufhob und einen optischen toten Winkel von 40 cm Durchmesser genau dort erzeugte, wo sich der Passagier befand.
Lehren für das Sensordesign in der autonomen Robotik 🤖
Dieses Gutachten zeigt, dass stereoskopische Sehsysteme, obwohl robust unter kontrollierten Bedingungen, anfällig für spiegelnde Oberflächen und extreme Lichtveränderungen sind. Die angewandte Methodik, die Fotogrammetrie, Punktwolkenausrichtung und Sensorsimulation kombiniert, etabliert eine reproduzierbare forensische Pipeline für zukünftige Vorfälle mit autonomen Robotern. Die Validierung der Sonnenreflexionshypothese zwingt die Hersteller, sensorische Redundanz, wie z. B. Laufzeit-LiDAR, zu integrieren, um diese optischen toten Winkel in Flughafenumgebungen zu mildern.
Wie kann eine forensische 3D-Rekonstruktion den Einfluss der visuellen Verdeckung durch projizierte Schatten auf die Flugbahn eines autonomen Roboters während eines Unfalls an einem Flughafen identifizieren?
(PS: In der forensischen Pipeline ist es am wichtigsten, die Beweise nicht mit den Referenzmodellen zu vermischen... sonst hat man am Ende einen Geist am Tatort.)