Ein autonomer chirurgischer Roboter, der für hochpräzise Leberbiopsien entwickelt wurde, verursachte während eines Eingriffs eine Gefäßverletzung. Der Vorfall, der zunächst auf einen Softwarefehler zurückgeführt wurde, wurde einer forensischen 3D-Begutachtung unterzogen. Die Untersuchung kombinierte Finite-Elemente-Simulationen in Ansys mit dem metrischen Scannen der Nadel, um die Dynamik des Versagens zu rekonstruieren. Dabei wurde nachgewiesen, dass die Grundursache nicht algorithmischer, sondern mechanischer und geweblicher Natur war.
Finite-Elemente-Simulation und Scannen der Nadel 🧬
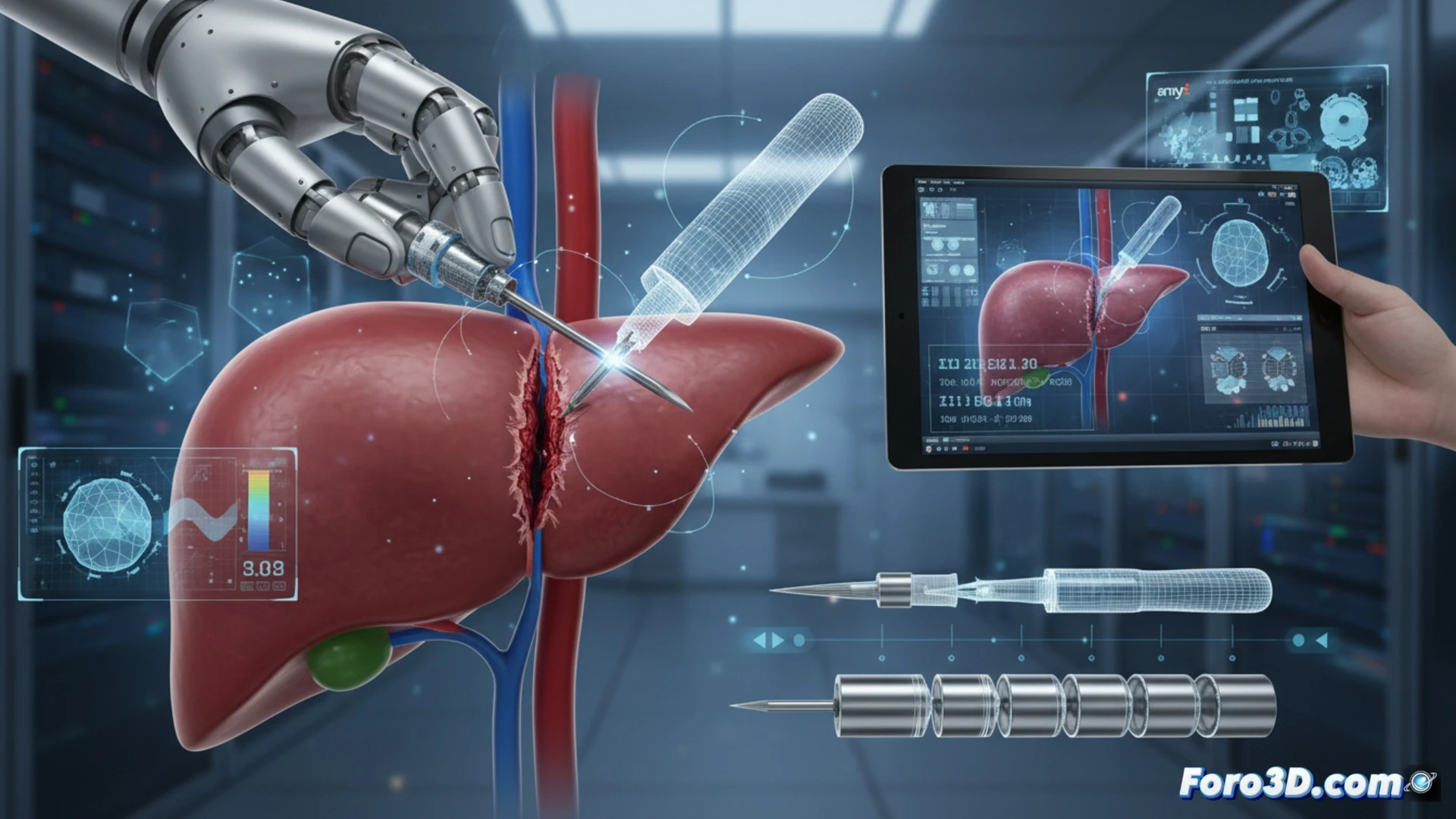
Das forensische Team digitalisierte die exakte Geometrie der Nadel mittels 3D-Scan und integrierte sie in ein Finite-Elemente-Modell in Ansys. Die Anisotropie des Leberparenchyms, gekennzeichnet durch Kollagenfasern mit variabler Richtungssteifigkeit, wurde reproduziert. Die Simulation zeigte, dass die Nadelspitze beim Durchdringen eines Leberlappens mit hoher fibröser Dichte ein asymmetrisches Biegemoment erfuhr. Dieses Drehmoment, das im starren Führungsalgorithmus des Roboters nicht berücksichtigt war, lenkte die Bahn um 4,2 Millimeter ab – genug, um ein benachbartes Portalgefäß zu durchtrennen.
Lehren für die autonome chirurgische Robotik 🤖
Die Begutachtung belegt, dass aktuelle Steuerungsmodelle die biomechanische Interaktion mit lebendem Gewebe unterschätzen. Um zukünftige Iatrogenien zu vermeiden, müssen autonome Navigationsalgorithmen Daten zur Gewebeanisotropie einbeziehen, die durch präoperative Elastographie oder Echtzeitsimulation gewonnen werden. Die Integration von digitalen Leberzwillingen, wie sie in Materialise Mimics erstellt werden, würde eine dynamische Anpassung von Kraft und Einstichwinkel ermöglichen und so die Lücke zwischen der theoretischen Modellsteifigkeit und der tatsächlichen Organkomplexität schließen.
Welche Lehren für das Design von Rückkopplungssensoren in autonomen chirurgischen Robotern lassen sich aus der 3D-Begutachtung dieses Versagens der Lebernadel ziehen, um zukünftige Gefäßverletzungen zu verhindern?
(PS: Und wenn das gedruckte Organ nicht schlägt, kannst du ja immer noch einen kleinen Motor hinzufügen... nur ein Scherz!)