Ein Kommissionierroboter kollidierte in einem Hochregallager mit einem Regal und löste einen Dominoeffekt aus, der mehrere Ladungsreihen umstürzen ließ. Der Unfall hätte vermieden werden können, wenn die LIDAR-Sensoren die Nähe des Hindernisses korrekt erkannt hätten. Um den Fehler zu verstehen, wurde der Unfall mithilfe eines digitalen Zwillings nachgestellt, wobei die mit FARO Scene gescannten realen Daten mit Simulationen in Gazebo und Visualisierungen in Unreal Engine 5 verglichen wurden. Ziel war es, die toten Winkel zu lokalisieren, die durch spiegelnde Reflexionen an den Metalloberflächen des Gangs entstanden.
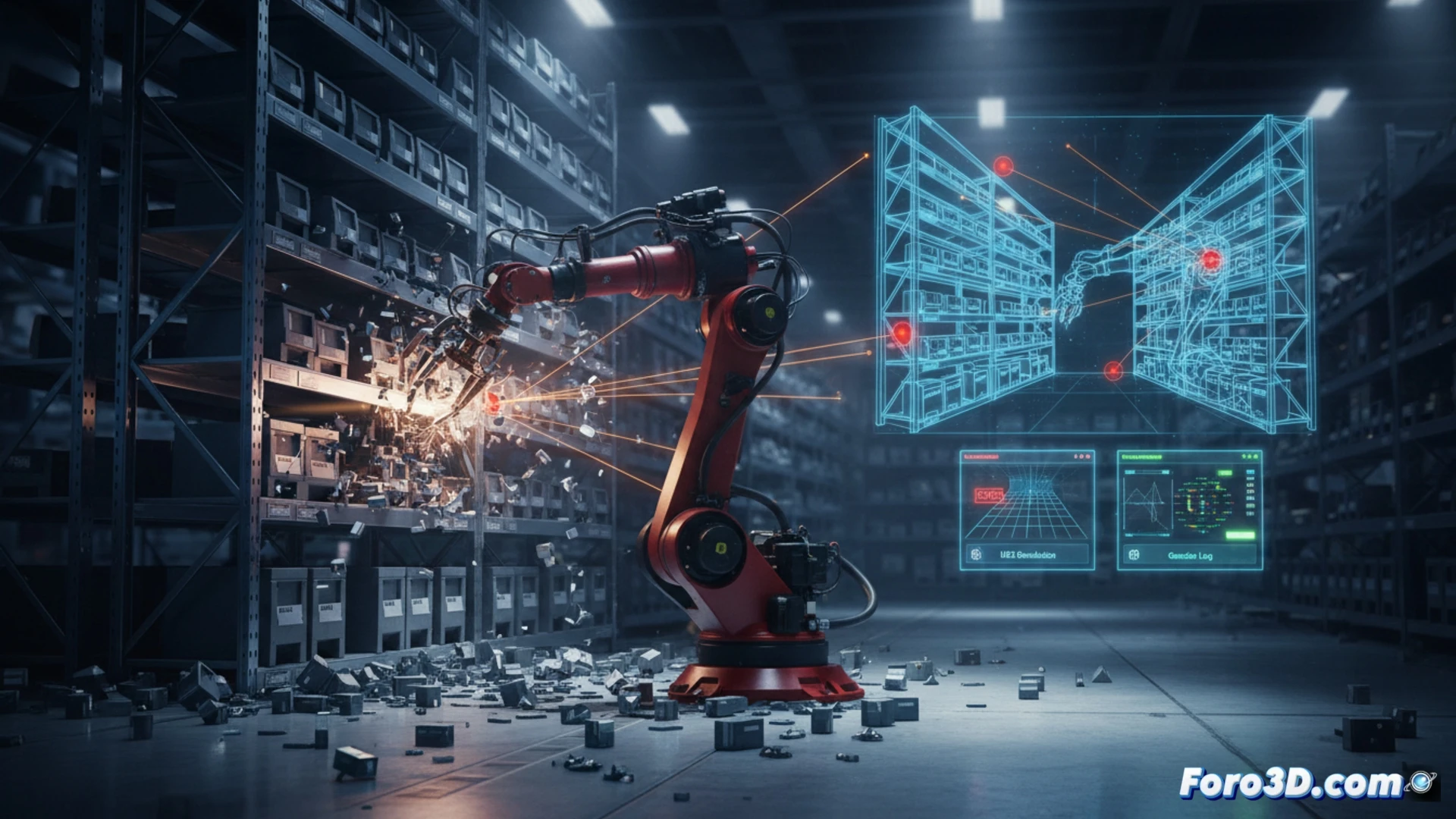
Forensische Rekonstruktion mit FARO Scene und Validierung in Gazebo 🛠️
Der erste Schritt war die Erfassung der Lagergoometrie nach dem Unfall mit FARO Scene, wodurch eine hochpräzise Punktwolke generiert wurde. Diese Punktwolke wurde in Navisworks importiert, um die Abfolge des strukturellen Zusammenbruchs zu analysieren. Anschließend wurde ein digitaler Zwilling des Roboters und der Regale in Gazebo erstellt, der die ursprünglichen Kommissionierbahnen nachbildete. Bei der Simulation der LIDAR-Fahrt in dieser virtuellen Umgebung wurden Bereiche identifiziert, in denen der Laserstrahl in flachen Winkeln auf polierte Stahlpaneele traf und Reflexionen erzeugte, die der Sensor als freien Raum interpretierte. Der direkte Vergleich zwischen der realen Punktwolke und der Simulation bestätigte, dass diese toten Winkel exakt mit der Position des Aufpralls übereinstimmten.
Sicherheit neu denken: Vom physischen Layout zur immersiven Simulation 🚧
Der Unfall zeigt, dass es gefährlich sein kann, sich ausschließlich auf LIDAR-Sensoren zu verlassen, ohne die virtuelle Umgebung zu validieren. Die Spiegelreflexion an Metallen ist ein kritischer toter Winkel in Hochregallagern. Als Verbesserung wird vorgeschlagen, das Layout neu zu gestalten, indem diffuse Markierungen an den Regalecken angebracht und die LIDAR-Halterungen neu positioniert werden, um die problematischen Winkel abzudecken. Unreal Engine 5 ermöglicht es, diese Änderungen in Echtzeit zu visualisieren und bietet Sicherheitsingenieuren ein immersives Werkzeug, um Konfigurationen zu testen, bevor sie physisch implementiert werden, wodurch das Risiko neuer Dominoeffekte verringert wird.
Welche Parameter des digitalen Zwillings in Unreal Engine 5 versagten bei der Vorhersage der Kollision des Kommissionierroboters und wie hätte der Dominoeffekt in einem Hochregallager vermieden werden können?
(PS: Bei Foro3D optimieren wir Routen, wie wir Polygone optimieren: bis der Computer "Stopp" sagt)