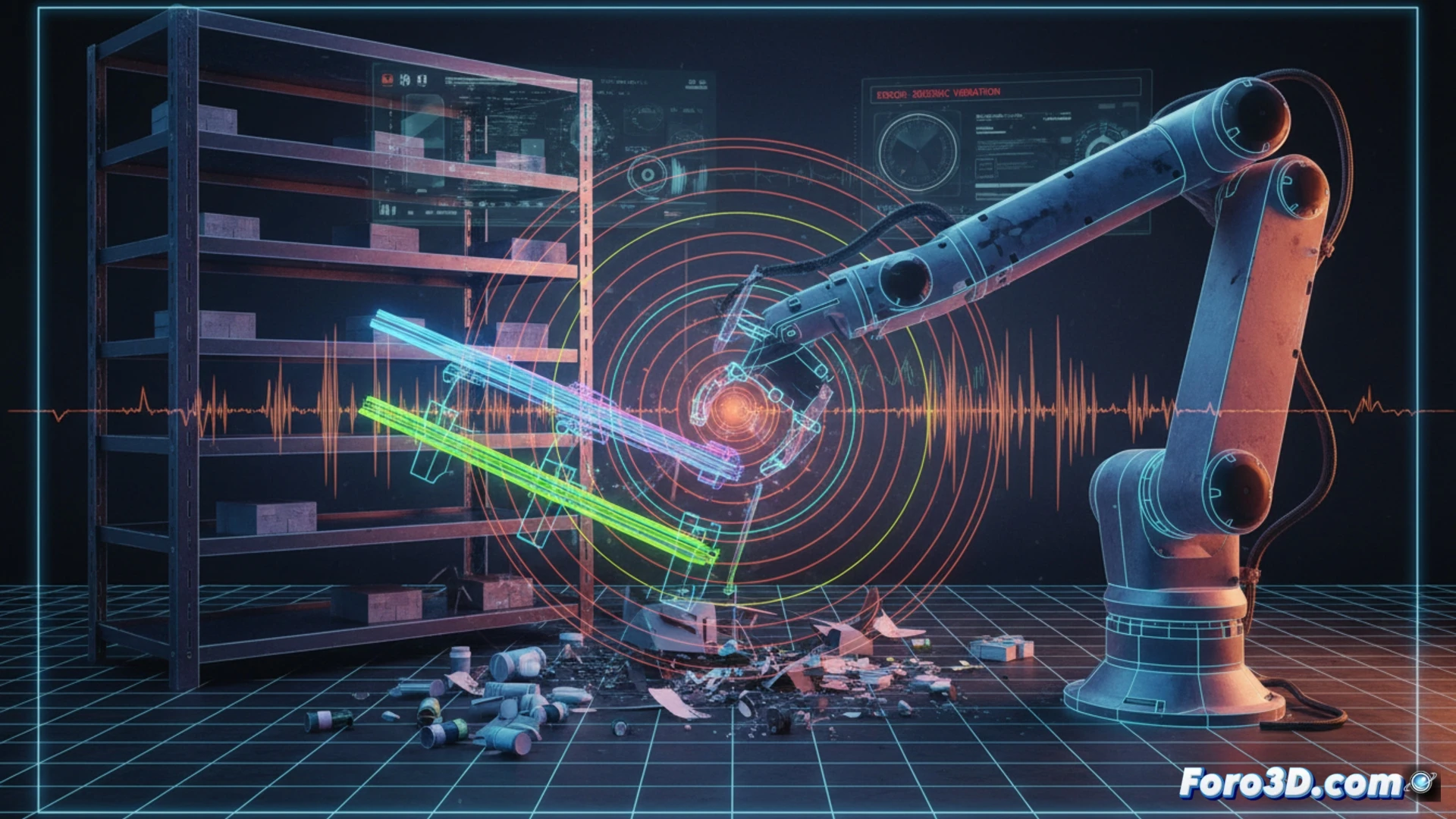
Der Vorfall ereignete sich in einer Hochgeschwindigkeits-Roboterapotheke: Der Roboterarm kollidierte heftig mit den Regalen des vertikalen Lagersystems. Auf den ersten Blick schien es ein Programmierfehler zu sein, aber das Wartungsteam vermutete einen externen Faktor. Die 3D-Analyse ergab millimetergenaue Verformungen an den Führungsschienen, verursacht durch seismische Vibrationen, die von den Standard-Sensoren des Gebäudes nicht erfasst wurden.
Inspektionsmethodik mit RoboGuide, RealWorks und CloudCompare 🤖
Die Diagnose begann in RoboGuide, wo die ursprüngliche Bahn des Arms simuliert wurde. Beim Vergleich mit den Telemetriedaten der SPS wurde eine Abweichung von 2,3 mm in der Z-Achse festgestellt. Zur Bestätigung der Ursache wurden die Schienen mit einem Trimble-Laserscanner gescannt und die Punktwolken in Trimble RealWorks verarbeitet. Die Ausrichtung der Oberflächen zeigte eine Ausbeulung an der linken Schiene. Mit CloudCompare wurde ein Distanzvergleich (M3C2) zwischen dem aktuellen Zustand und dem ursprünglichen CAD-Design durchgeführt, wobei Verformungen von bis zu 1,8 mm im Aufprallbereich berechnet wurden. Blender diente zur Erstellung einer forensischen Animation, die den Zeitpunkt der seismischen Vibration mit der Bahn des Endeffektors korreliert.
Lehren für die Kalibrierung automatisierter Systeme ⚙️
Dieser Fall zeigt, dass robotergestützte Systeme in Apotheken eine strukturelle Überwachung erfordern, die über die internen Sensoren des Roboters hinausgeht. Seismische Vibrationen mit geringer Amplitude können, auch wenn sie das Gebäude nicht beschädigen, Präzisionsschienen dekalibrieren. Es wird empfohlen, Beschleunigungssensoren an der Basis der Regale zu integrieren und regelmäßige 3D-Scans mit CloudCompare durchzuführen, um submillimeterfeine Verformungen zu erkennen, bevor sie zu Kollisionen führen. Die Korrektur umfasste das Nachjustieren der Schienenverankerungen und die Neukalibrierung des Arms in RoboGuide mit einer neuen Fehlerkompensationskarte.
Wie zuverlässig ist das 3D-Kollisionsanalysemodell zur Vorhersage der Bahnen eines pharmazeutischen Roboterarms, wenn es mit seismischen Vibrationen konfrontiert wird, die ursprünglich nicht in der Umgebung der Roboterapotheke modelliert wurden?
(PS: Roboter zu simulieren macht Spaß, bis sie sich entscheiden, deinen Befehlen nicht zu folgen.)