Der jüngste Ausfall eines Roboterregalsystems hat Logistik- und Industrieingenieure in Alarmbereitschaft versetzt. Dieser Vorfall, bei dem eine automatisierte Struktur während des Betriebs kollabierte, stoppte nicht nur die Lieferkette, sondern offenbarte auch versteckte Schwachstellen im mechanischen Design. Um die Grundursachen zu verstehen, greifen wir auf 3D-Simulation und digitale Zwillinge zurück – Werkzeuge, die es ermöglichen, das Ereignis millimetergenau nachzubilden und die Spannungsverteilung in jeder Komponente zu visualisieren.
Modellierung des Kollapses und Analyse struktureller Spannungen 🏗️
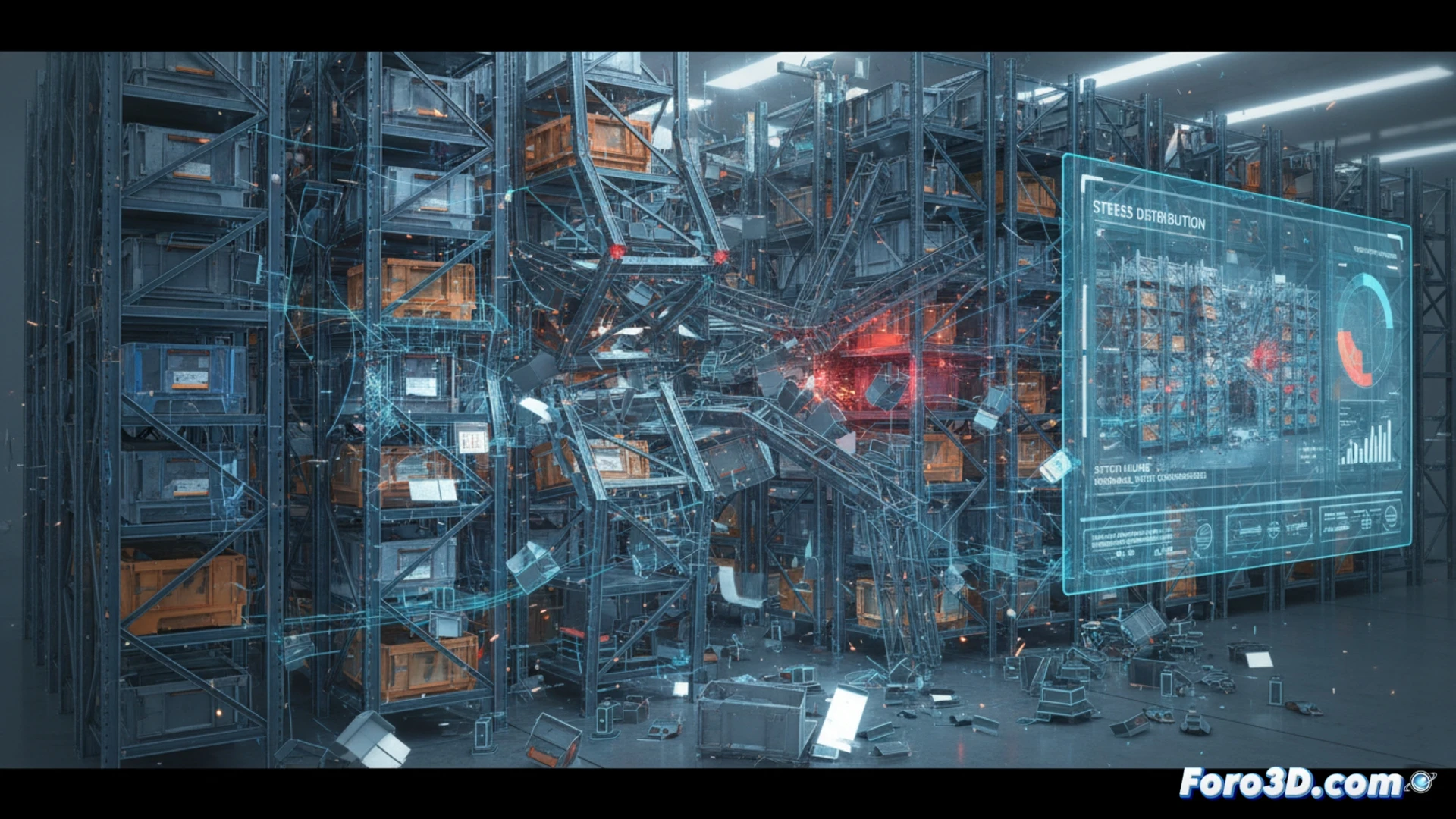
Mithilfe von Finite-Elemente-Software (FEA) und parametrischer Modellierung rekonstruierten wir die exakte Geometrie des Roboterregals, einschließlich Schienen, Stützen und Verankerungspunkten. Die dynamische Simulation reproduzierte die Kollapssequenz: zunächst eine fortschreitende Verformung an den Basisverbindungen, dann ein Sprödbruch in den mittleren Längsträgern. Die Wärmekarten zeigten, dass die maximale Spannung die Streckgrenze des Stahls um 40 % überschritt, lokalisiert am Verbindungspunkt zwischen Führungsschiene und vertikalem Profil. Dies deutet darauf hin, dass Materialermüdung, verstärkt durch wiederholte Lastzyklen, der Hauptauslöser war.
Lehren für die vorausschauende Wartung mit digitalen Zwillingen 🔧
Dieser Fall zeigt, dass die 3D-Simulation nicht nur zum Entwerfen dient, sondern auch zur Vorhersage von Ausfällen, bevor sie auftreten. Durch die Integration von IoT-Sensordaten in einen digitalen Zwilling können wir die Verformung jedes Regals in Echtzeit überwachen und die Lastzyklen anpassen. Der technische Vorschlag ist klar: Implementierung regelmäßiger Ermüdungssimulationen im virtuellen Modell, die 10 Jahre Betrieb in Rechenstunden nachbilden. So werden kritische Punkte identifiziert und eine proaktive Wartung geplant, wodurch Kollapse vermieden und die Lebensdauer des Robotersystems optimiert werden.
Welche kritischen Last- und Strukturermüdungsparameter sollten in eine 3D-Simulation einbezogen werden, um den Kollaps in industriellen Roboterregalen präzise vorherzusagen?
(PS: Bei Foro3D optimieren wir Routen, wie wir Polygone optimieren: bis der Computer „Stopp“ sagt)