Der jüngste Vorfall, bei dem ein schwerer Bergbauröter während eines Abbauvorgangs einen katastrophalen Bruch seines Gelenkarms erlitt, hat den Fokus auf mechanische Ausfälle in extremen Umgebungen gelenkt. Diese Art von Maschinerie, die für zyklische Lasten und abrasive Bedingungen ausgelegt ist, versagte plötzlich, was auf einen Ermüdungsbruch des Materials oder eine vom Steuerungssystem nicht erkannte Überlastung hindeutet. Die Analyse dieses Ereignisses aus ingenieurtechnischer Sicht ermöglicht es uns zu verstehen, wie das Design und die Überwachung dieser Anlagen optimiert werden können.
Materialermüdung, Überlastung und Softwarefehler beim Ausfall ⚙️
Die technischen Ursachen dieses Bruchs lassen sich in drei Hauptbereiche unterteilen. Erstens die Materialermüdung: Der Bergbauröter arbeitet unter ständigen Vibrationen und Stößen, was zu Mikrorissen in Stahl- oder Aluminiumlegierungen führt, die mit der Zeit in einem Sprödbruch enden. Zweitens die betriebliche Überlastung: Wenn das Sensorsystem das Gewicht des geförderten Materials nicht korrekt kalibrierte oder der Roboter bei einer erzwungenen Drehung sein maximales Drehmoment überschritt, überschritt die Spannung in den Aktuatoren und Verbindungen die Elastizitätsgrenze. Drittens ein möglicher Softwarefehler in der Bahnsteuerung, bei dem eine fehlerhafte Rückkopplungsschleife eine abrupte Bewegung ohne Trägheitsausgleich anordnete, was zu einem Spannungsspitze an der kritischen Stelle der Struktur führte.
Wie 3D-Simulation und digitale Zwillinge diese Ausfälle verhindern 🛠️
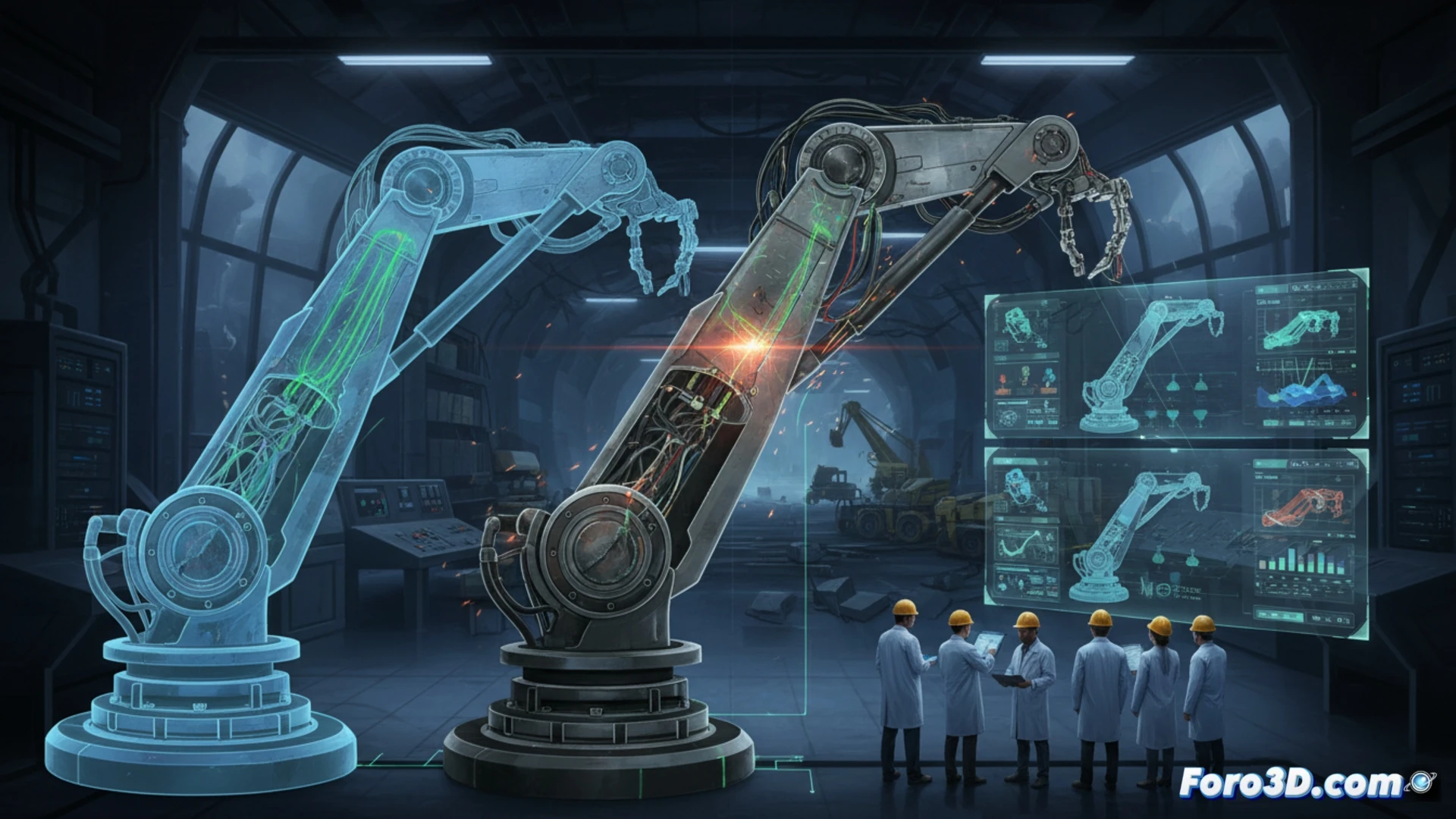
Die Simulation mittels digitaler Zwillinge ist das Schlüsselwerkzeug, um diesen Bruch vorherzusagen und zu verhindern. Durch die Modellierung des Roboters in 3D mit Spannungs-Dehnungs-Daten können Wärmekarten visualisiert werden, die die kritischen Punkte anzeigen, an denen sich Ermüdung ansammelt, wie z. B. Kugelgelenke oder Schweißnähte des Arms. Ein digitaler Zwilling ermöglicht die Ausführung Tausender virtueller Lastzyklen, ohne die reale Anlage zu verschleißen, und identifiziert Überlastungen, bevor sie auftreten. Darüber hinaus integriert er IoT-Sensordaten, um vor anomalen Vibrationen zu warnen und die Maschine beim ersten Anzeichen eines Mikrorisses zu stoppen, wodurch katastrophale Brüche im automatisierten Bergbau vermieden werden.
Wie kann ein digitaler Zwilling die Ermüdungsversagensmodi eines Gelenkarms eines Bergbauröters genau vorhersagen und verhindern, bevor ein katastrophaler Bruch auftritt, unter Berücksichtigung von Variablen wie dynamischer Last und Abrasion der Untertageumgebung?
(PS: Roboter zu simulieren macht Spaß, bis sie beschließen, deinen Befehlen nicht zu folgen.)