Kengoro: der humanoide Roboter, der wie ein Mensch schwitzt
Im JSK-Labor der Universität Tokio suchen die Ingenieure nicht nur Maschinen zu bauen, sondern das Leben zu replizieren. Ihre fortschrittlichste Kreation, Kengoro, ist ein Versuch, das komplexe System aus Knochen, Muskeln und Sehnen eines Menschen präzise zu kopieren. Dieser radikale Ansatz definiert neu, wie man einen Roboter entwirft und steuert, und weicht von der traditionellen Starrheit ab. 🤖
Ein Skelett, das schwitzt, um nicht überzu hitzen
Die größte technische Herausforderung von Kengoro war die Bewältigung der Wärme, die von seinen 108 Motoren erzeugt wird. Die Lösung kam nicht von Ventilatoren oder großen Kühlkörpern, sondern durch die Nachahmung eines biologischen Prozesses. Die Forscher implementierten ein Verdampfungskühlsystem. Das Wasser zirkuliert durch den porösen Aluminium-Skelettrahmen, sickert an die Oberfläche und verdampft, wodurch Wärme effizient abgezogen wird, genau wie Schweiß den Körper kühlt.
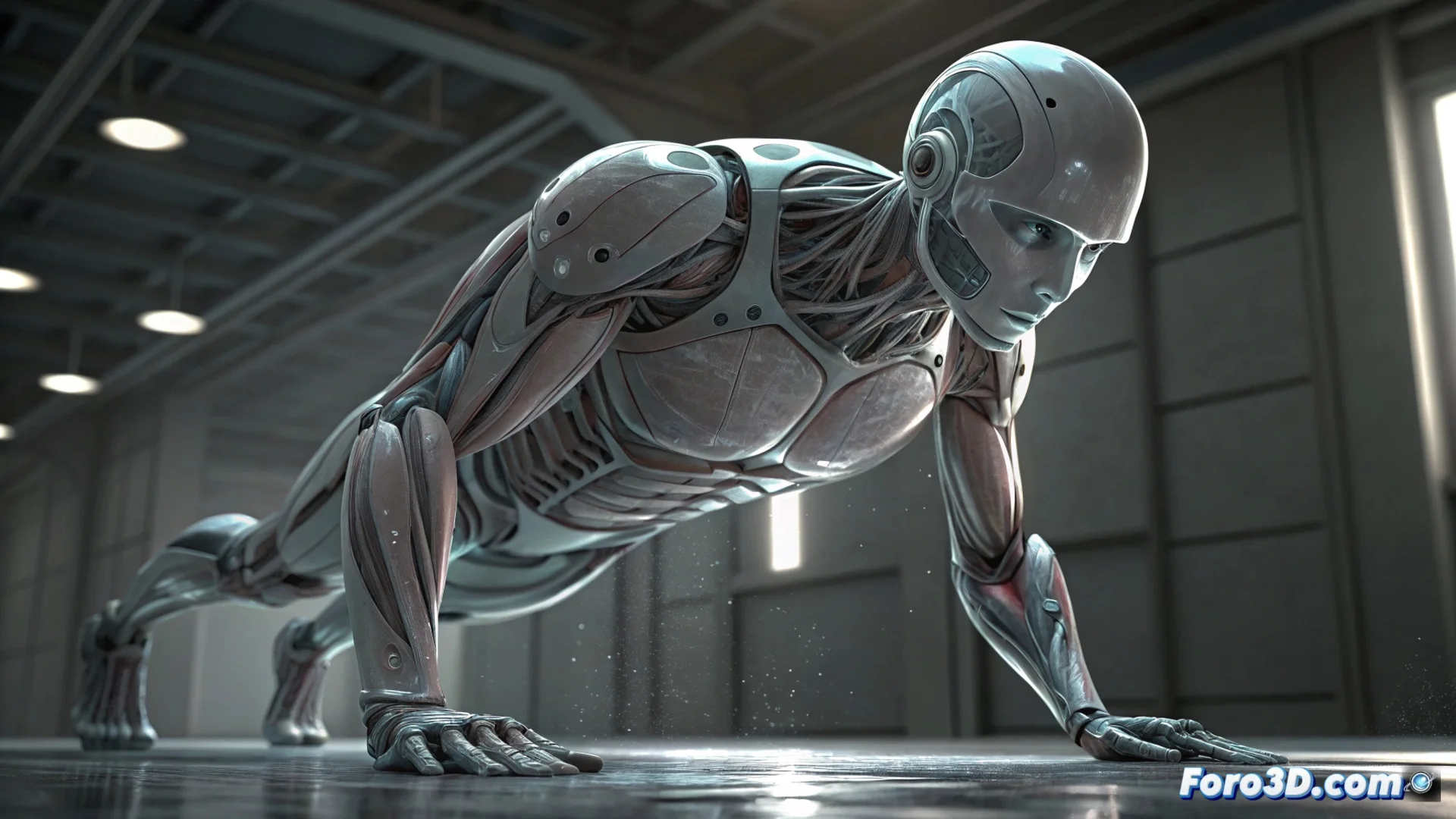
Schlüsselvorteile der Kühlung durch „Schweiß“:- Ermöglicht dem Roboter, kontinuierlich länger zu funktionieren, sogar unter schweren Belastungen wie Liegestütze.
- Eliminiert die Notwendigkeit voluminöser Kühllkomponenten, die die Bewegung und das Design einschränken würden.
- Verteilt die Kühlung gleichmäßig über die gesamte Struktur und schützt die kritischen Aktuatoren.
Diese Kühlmethode ist ein Paradigmenwechsel. Wir fügen kein Gewicht hinzu, wir nutzen die Struktur selbst als thermisches System.
Organische Bewegung dank flexibler Wirbelsäule
Die Priorisierung einer bioinspirierten Anatomie verleiht Kengoro außergewöhnliche Bewegungsfähigkeiten. Seine flexible Wirbelsäule ist entscheidend für Gleichgewicht, Stoßdämpfung und die Ausführung dynamischer Gesten, die Roboter mit starren Rümpfen nicht erreichen können. Diese Vielseitigkeit eröffnet neue Grenzen für die Erforschung menschlicher Bewegungen.
Direkte Anwendungen dieses Designs:- Fortschritte im Bereich der Assistenzrobotik, durch die Schaffung von Exoskeletten oder Prothesen mit natürlicheren Bewegungen.
- Besseres Verständnis der menschlichen Biomechanik zur Vermeidung von Verletzungen oder Verbesserung der athletischen Leistung.
- Bereitstellung einer realistischen physischen Plattform zum Testen von Steuerungsalgorithmen und Simulationen.
Die Zukunft: Von der Nachahmung von Bewegungen zur Replikation von Empfindungen
Kengoro stellt einen Sprung zu Robotern dar, die nicht nur aussehen, sondern auch funktionieren wie lebende Organismen. Der nächste logische Schritt in dieser Nachahmung könnte die Integration sensorischer Systeme sein, die es dem Roboter ermöglichen, seine Umgebung und seinen inneren Zustand reicher wahrzunehmen. Das Projekt legt den Grundstein für Maschinen, die auf genuin organische und anpassungsfähige Weise mit der Welt interagieren. 🔬